
Ручная манипуляция
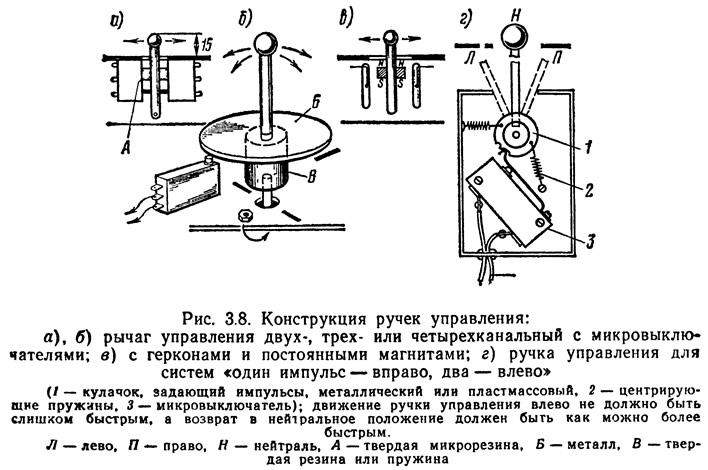
Ручная манипуляция (рис. 3.8) — это в простейшем случае нажатие и отпускание кнопки, вызывающей посылку сигнала передатчиком. Поскольку величины токов и напряжений в прерываемых цепях невелики, то в простейших одноканальных передатчиках можно применять любые электротехнические кнопки, например звонковые. Для многоканальных же аппаратов важным фактором является манипуляция отдельных каналов НЧ. Включающие кнопки должна быть самого высокого качества, причем лучше применять микровыключатели. В противном случае тон от включенного генератора будет нечистым, что вызовет много трудностей с селекцией этих сигналов в приемнике. Сказанное выше относится главным образом к генераторам, в которых манипуляция происходит непосредственно в контуре звуковых колебаний (см. рис. 14.44). Плохое качество кнопок очень часто является источником неполадок в многоканальной аппаратуре.
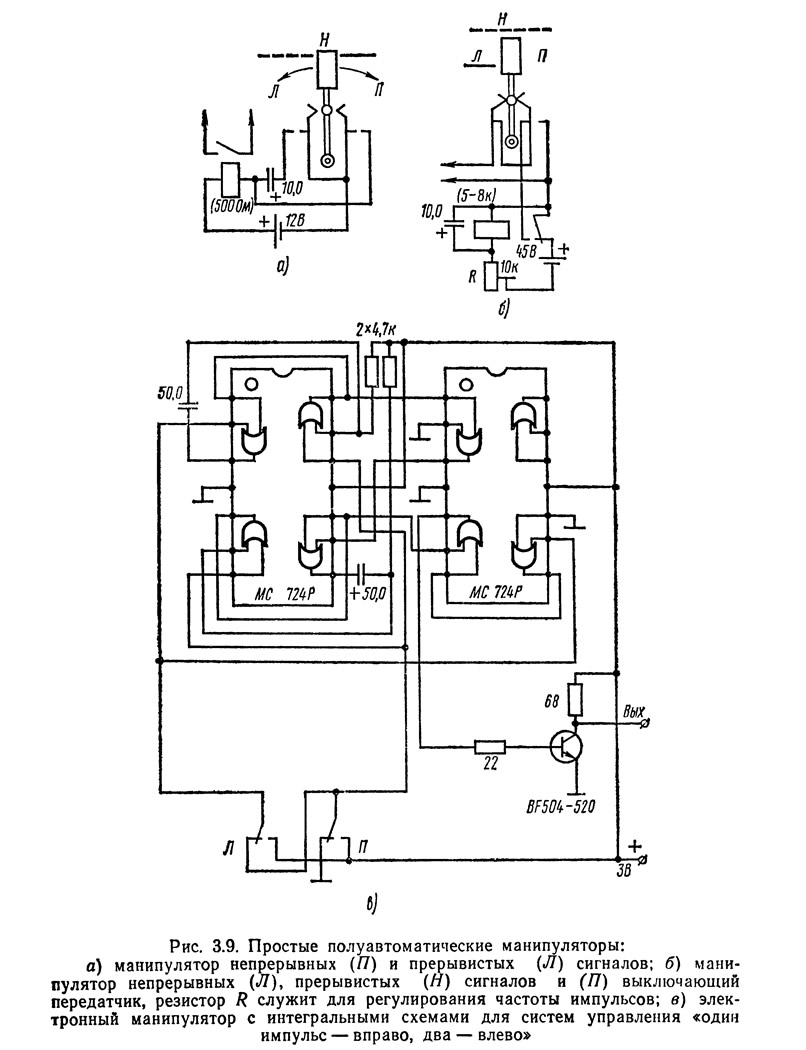
Для облегчения работы по управлению можно применять диспетчерские манипуляторы (рис. 3.9). Они размещаются на корпусе передатчика.
Типовой ручной манипулятор (для одноканальных аппаратов) имеет визуальный индикатор посылаемой команды, вследствие чего отпадает необходимость в запоминании предыдущих отклонений ручки и соответственно руля модели и устраняется возможность ошибок. Манипуляторы этого типа применяются при управлении всякого рода звездообразными распределителями, а также одноканальными исполнительными механизмами на борту модели. Такие ручные манипуляторы имеют ограниченную скорость формирования команд, что может удовлетворять моделиста, применяющего простейшие системы управления.
Полуавтоматическая манипуляция
Полуавтоматическая манипуляция заключается в замене ручной манипуляции передающих устройств соответствующей механической, электромеханической или электронной схемой, которая, будучи раз включенной, исполняет работу оператора вплоть до момента ее выключения. Все эти схемы позволяют передавать сигналы, состоящие из командных импульсов с заданным (часто регулируемым) отношением их длительности к паузе между отдельными импульсами или же с определенным числом импульсов (см. рис. 3.9).
Механическая система
Механическая система предназначена прежде всего для управления в системе распределительной селекции. Для этого можно использовать, например, обычный телефонный цифровой диск (номеронабиратель). Цифровые диски используют в качестве манипуляторов для управления всеми стационарными промышленными моделями, кроме того, колесными, а иногда и плавающими. Манипулятор с цифровым диском работает с небольшой скоростью. В простых устройствах для пропорционального управления можно применять механические манипуляторы с регулируемым отношением пауза/длительность импульса, несколько вариантов которых показано на рис. 3.10. Достоинством их являются отсутствие искажений сигналов при крайних отклонениях ручки управления и малая стоимость; недостатком — большая трудоемкость изготовления и быстрый износ трущихся частей.
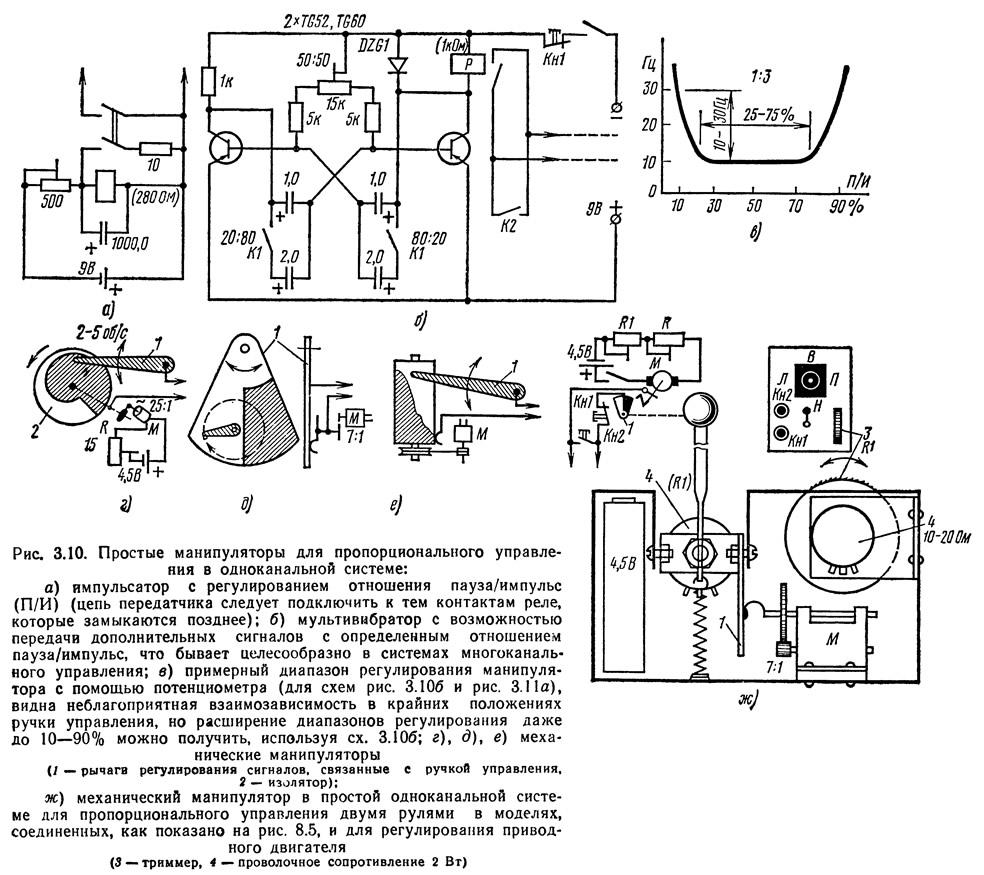
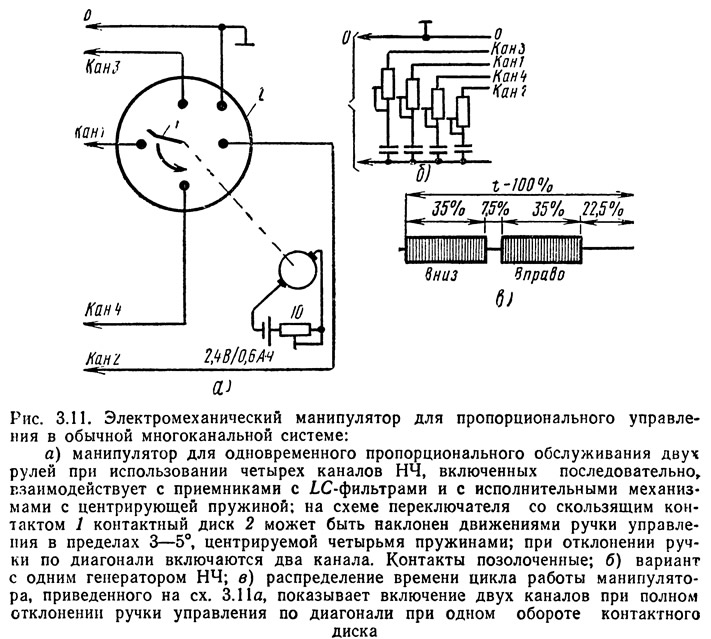
Вращающийся манипулятор позволяет одновременно обслуживать несколько органов модели с их автоматическим возвратом в нейтральное положение. Подобный же манипулятор, показанный на рис. 3.11, служит для пропорционального управления в многоканальной системе. В манипуляторах необходимо применять контакты очень высокого качества (для чего нередко используют золочение). Кроме того, требуется высокая точность исполнения всей конструкции.
Электромеханическая система
Электромеханическая система основана на использовании реле времени. Ее основным дефектом являются трудность регулирования длительности импульсов и пауз и большая зависимость от колебаний напряжения питания. Самые простые манипуляторы (рис. 3.9 а) могут найти применение в одно- и многоканальных передатчиках пропорционального управления (рис. 3.9 б).
Электронные системы
Электронные системы манипуляции являются самыми прогрессивными. Основным блоком в них является электронный манипулятор на базе мультивибратора с электромагнитным реле или же безрелейный.
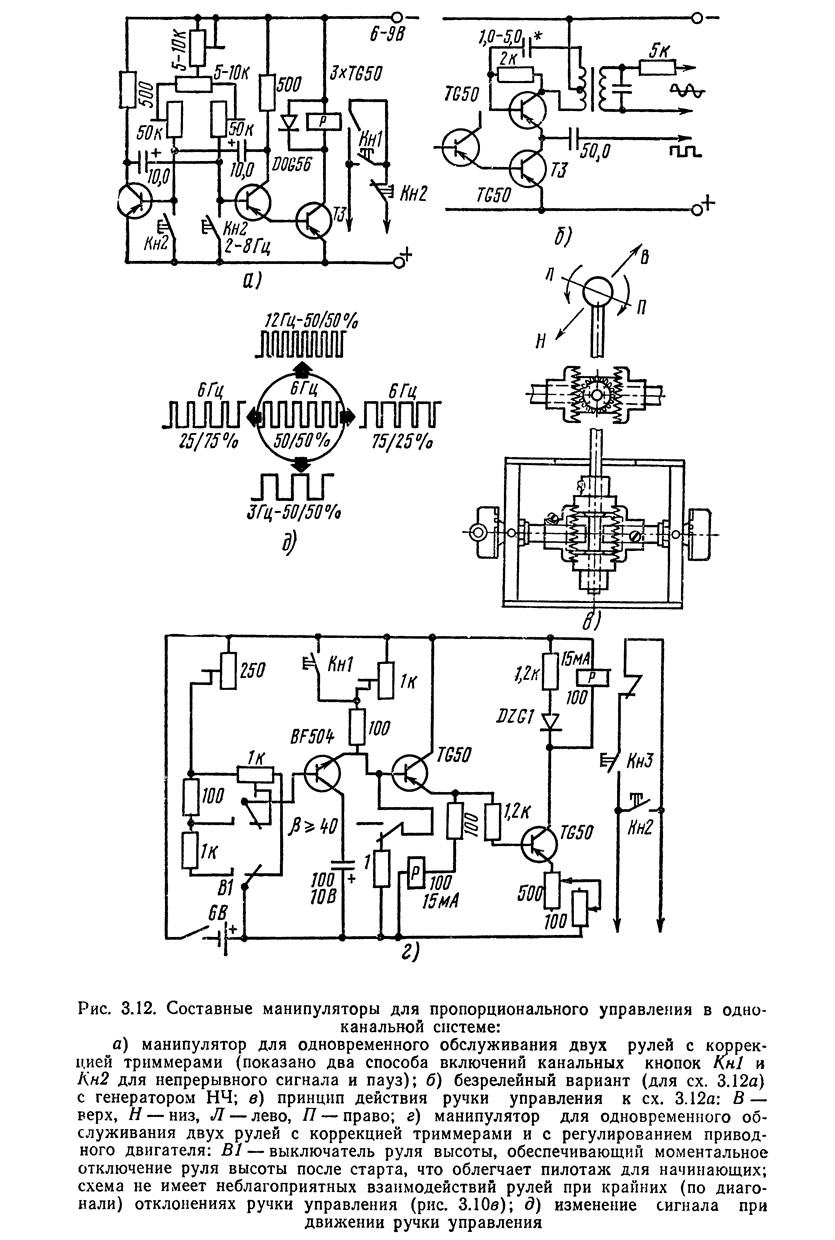
Эта система позволяет плавно регулировать длительность импульсов в большом диапазоне с помощью потенциометров, поэтому ее применяют в системах пропорционального управления. Манипулятор может быть выполнен с применением транзисторов или тиристоров. Примеры решений электронных манипуляторов приведены на рис. 3.12.
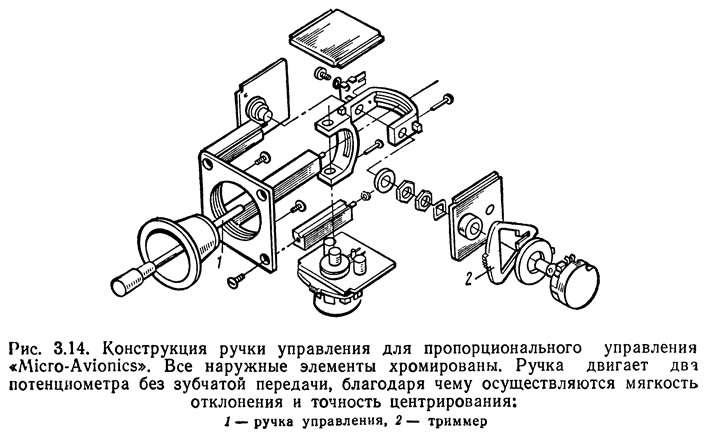
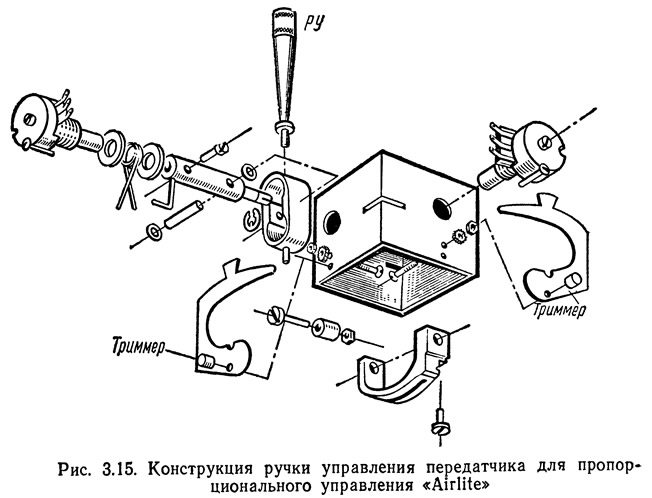
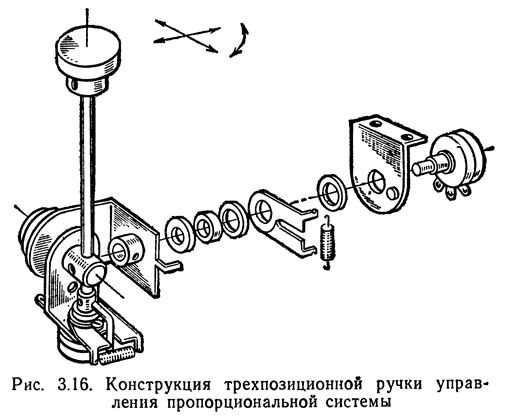
Описанные выше манипуляторы различных типов можно в случае надобности сочетать друг с другом. В качестве диспетчерского органа управления применяются ручки (воротки), рычаги управления, рули или штурвальные колеса, связанные с регулировочными потенциометрами манипулятора (рис. 3.13—3.16).
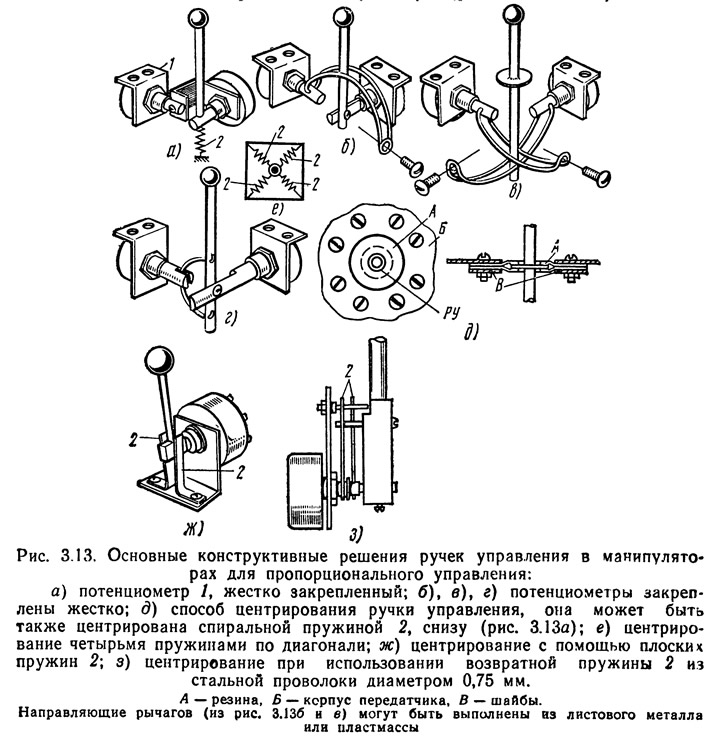
Сформулируем требования, предъявляемые к ручкам управления для систем пропорционального управления: точное электрическое и механическое центрирование; корпус должен быть нержавеющим; ручка должна поворачиваться в обе стороны на 35°; коррекция триммерами в диапазоне 25% полного отклонения ручки; при коррекции ручка остается в нейтральном положении; легкость свертывания (закрытые потенциометры, закрытое лобовое отверстие, использование пластмасс); малые размеры, занимаемые на передней панели (50X50 мм или диаметр 50 мм) и по высоте (около 40 мм); возможность регулирования длины ручки (например, телескопическое перемещение); применение центрирующей пружины, имитирующей легкое сопротивление руля при отклонениях ручки.
Преимуществом электрической коррекции триммерами положения ручки управления является то, что движения исполнительных механизмов в этом случае всегда одинаковы и не ограничены с одной стороны, как при механической коррекции. Однако имеются механические триммеры, которые не поворачивают ось ручки, а только наклоняют ее.
Ручки триммеров обычно размещаются ниже ручек управления и со стороны вертикальной оси передатчика (ближе к центру). Отдельное трехпозиционное устройство управления (вместе с потенциометрами 5 или 10 кОм) имеет размеры 67X67X44 мм.
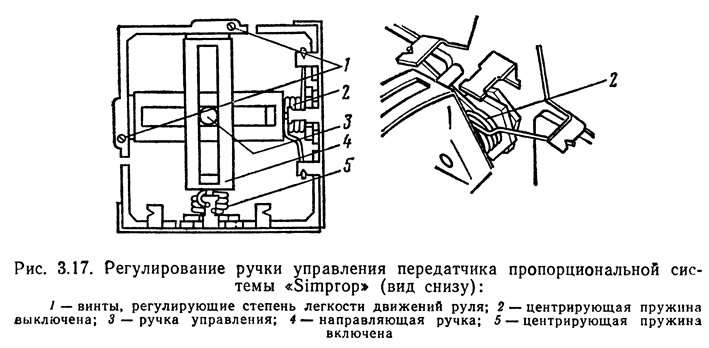
Современные ручки управления можно легко преобразовать из автоматически центрируемых в нецентрируемые и наоборот. Для этого следует вынуть или вложить возвратную пружину (рис. 3.17). Встречаются также пружины с регулируемой степенью нажима. Хорошие устройства управления центрируются даже при обратном нажиме в 55 гс. Зона нечувствительности исполнительного механизма (мертвая зона) возникает главным образом из-за люфта в ручках управления. Этот люфт на торце руля составляет обычно около 1,2 мм. При таком люфте можно получить точность установки исполнительного механизма ±1°.
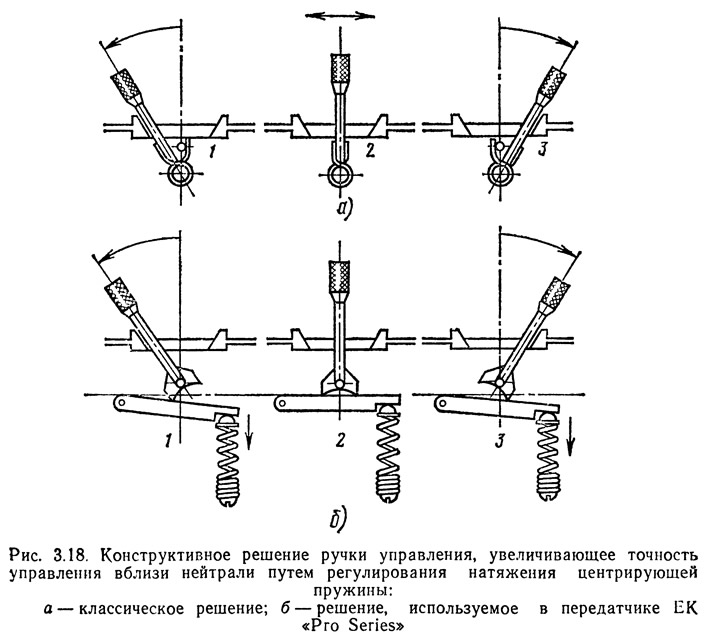
Для противодействия этим люфтам применяют ручки специальной конструкции (рис. 3.18). Триммер в передатчике простой аппаратуры для пропорционального управления должен охватывать 10—15% полного диапазона отклонения рулей, а в устройствах с исполнительными механизмами — 15—25%.
Автоматическая манипуляция
Автоматические системы управления представляют сложные электронные устройства. Они составляют большую часть передающих устройств современных систем многоканального пропорционального управления.
Наиболее простое устройство автоматического управления можно сделать, применив для этого магнитофон. Записав на магнитную ленту сигналы работающего передатчика, их можно впоследствии проконтролировать или сравнить. Магнитофон может помочь при испытании на местности.
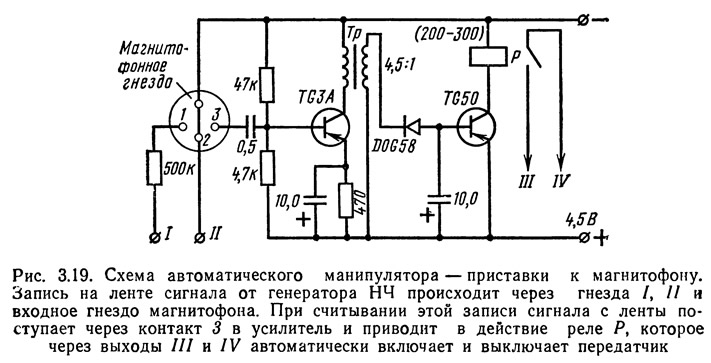
Пользуясь магнитной записью сигналов и передатчиком одновременно, возможно сочетать ручное управление с автоматическим. Схема передающего устройства с автоматическим управлением от магнитофона представлена на рис. 3.19.