
Классификация систем управления
Все устройства для дистанционного управления моделями независимо от их схем предназначены для любых изменений направления движения модели или выполнения других определенных команд на расстоянии беспроводным путем. Это могут быть изменение скорости движения, выключение двигателя, запуск устройств, передающих звуковые или оптические сигналы, сбрасывание грузов, фотографирование, научные измерения и другие операции.
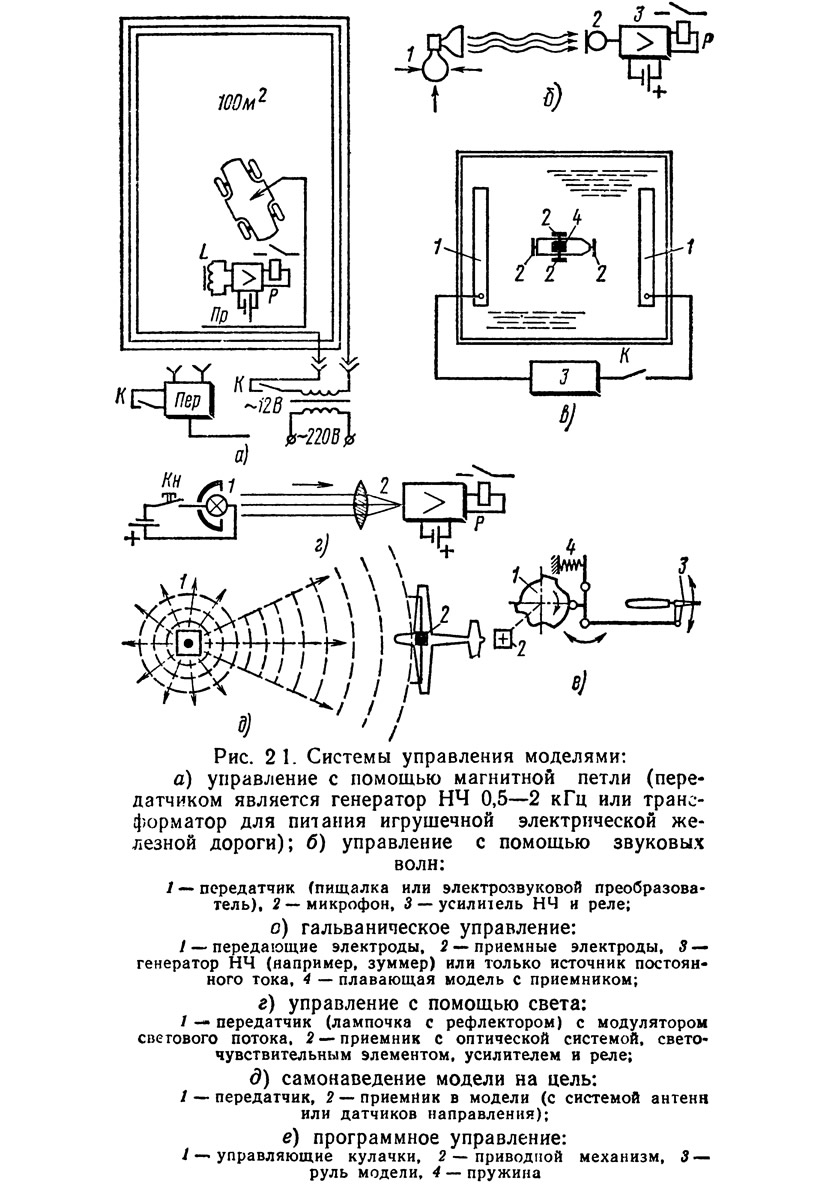
Область техники, которая занимается комплексом вопросов передачи команд управления на расстоянии, называется телемеханикой. Различаются следующие системы управления: дистанционное управление, самонаведение и программное управление. Дистанционное управление — пост управления находится вне модели. Самонаведение — пост управления находится в самой модели, и она наводится на определенную точку или направление (рис. 2.1 д). Программное управление — программа движений модели задана заранее перед стартом (рис. 2.1 е). Иногда эти системы связаны друг с другом.
В каждой системе дистанционного управления можно выделить следующие основные части:
Передающее устройство, в котором формируется определенная команда, передаваемая на модель с помощью электромагнитных или звуковых волн, вырабатываемых в передатчике.
Соединительная линия образует как бы группу каналов, соединяющих передающее устройство с приемным; по этой линии с помощью электромагнитных или звуковых волн передаются команды от передатчика к приемнику модели. Различают системы одноканальные и многоканальные.
Приемное устройство, в котором с помощью соответствующих узлов происходят обнаружение и распознавание команд, поступающих от передающего устройства; затем эти команды через селективные устройства, промежуточные схемы и исполнительные механизмы приводят в движение соответствующие рули или устройства модели.
Источники питания обеспечивают передающему и приемному устройствам постоянное поступление электроэнергии, необходимой для их работы.
Как уже упоминалось, для беспроводной передачи команд от передатчика к приемнику модели используются различные волны и физические явления. В зависимости от природы волн, используемых в устройстве, различают и системы дистанционного управления.
Управление с помощью магнитной петли
Схема системы управления с помощью магнитной петли приведена на рис. 2.1 а. Для изготовления и использования такой системы не нужны какие-либо специальные разрешения. Эту систему охотно используют для управления колесными и плавающими игрушками, а также макетами в витринах магазинов, торговых стендов или музеев.
Управление с помощью звуковых волн
Структурная схема системы управления с помощью звуковых волн приведена на рис. 2.1 б. Применяя разнотональные пищалки и дополняя приемник рядом LC-фильтров (см., например, на рис. 7.8), можно получить многоканальное устройство.
Гальваническое управление
Гальваническое управление — это вариант системы управления с помощью электрических волн, распространяющихся в толще воды. Структурная схема системы представлена на рис. 2.1 в.
Управление с помощью световых волн
Структурная схема этой системы представлена на рис. 2.1 г. В этой системе различают управление с помощью видимых и невидимых световых лучей (управление инфракрасным излучением).
Управление с помощью радиоволн
В настоящее время для дистанционного управления моделями все чаще используют радиоволны — электромагнитные колебания с частотой от десятков мегагерц и выше. Для использования радиопередающих устройств требуется специальное разрешение.
Различают радиоволны: немодулированные и модулированные. Для дистанционного управления моделями используют и те и другие. Как модулированные радиоволны, так и немодулированные могут передаваться либо в виде непрерывных, либо в виде прерывистых сигналов, например в виде импульсов (в простейшем случае это телеграфные знаки). В этом случае периодическое включение и выключение передатчика называют манипуляцией, которая может быть ручной, полуавтоматической или автоматической.
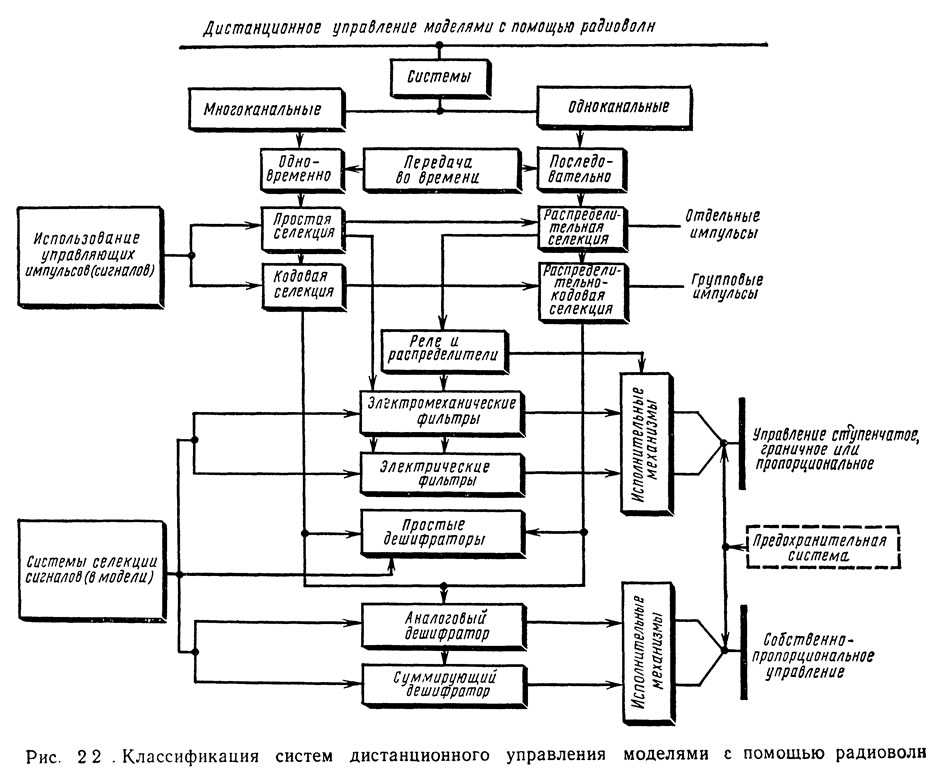
Устройства для дистанционного управления моделями подразделяют в зависимости от характера передаваемых команд и способа их передачи (рис. 2.2).
В самых простых системах управления сигнал, преобразованный приемником в импульс тока, вызывает срабатывание реле или исполнительного механизма, а исчезновение сигнала вызывает его выключение, т. е. возврат в исходное состояние. В этом случае говорят об управляющих импульсах (токовых и бестоковых), число их признаков равно двум. Однако управляющие импульсы могут иметь и другие признаки. В дистанционном управлении используют:
- полярные признаки — импульсы положительные и отрицательные; число признаков равно двум;
- временные признаки — импульсы различной длительности; число признаков равно двум, если используют импульсы короткие и длинные;
- временные признаки могут также относиться к паузам между импульсами, т. е. к коротким и длинным паузам (число признаков равно двум);
- частотные признаки — импульсы отличаются друг от друга частотой несущего колебания;
- кодовые признаки — команды посылаются в виде импульсов, а конкретная команда определяется числом импульсов в каждой пачке.
Командные импульсы бывают одиночными (каждый импульс является командой, принимаемой исполнительной системой) и групповыми (команде соответствует кодовая группа, составленная из отдельных импульсов, которые вырабатываются по определенному закону). Непрерывные аналоговые команды применяют тогда, когда необходима большая точность управления (например, при пропорциональном управлении). Важно также взаимное расположение импульсов в пределах группы.
Наиболее распространено частотное и временное разделение сигналов.
Теперь приведем несколько определений, касающихся систем связи.
Одноканальная система — это такая система, в которой команды передаются на модель с помощью радиоволн одной и той же частоты, для чего могут использоваться как немодулированные, так и модулированные колебания.
Многоканальная система отличается от одноканальной тем, что команды поступают на модель одновременно или поочередно с помощью одной несущей волны, модулированной несколькими звуковыми частотами, следовательно, по многим каналам.
Укажем способы распознавания сигналов, т. е. селекции управляющих импульсов.
Простая селекция используется тогда, когда посылаются отдельные импульсы, причем как неодновременно, так и одновременно. Число каналов в соединительной линии пропорционально числу управляемых механизмов, следовательно, эта линия является многоканальной. Командные импульсы различаются качественными признаками (например, частотными).
Распределительная селекция применяется тогда, когда посылаемые импульсы являются дискретными и проходят поочередно. Система связи в этом случае одноканальная (или двухканальная). Распределители синхронизированы (на передающей и приемной стороне) или не синхронизированы (распределитель может быть только на приемной стороне). Командные импульсы различаются по временным или по кодовым признакам.
Параллельно-кодовая селекция применяется тогда, когда передаваемые команды составлены из групп импульсов, образующих соответствующий код, причем эти импульсы приходят одновременно. В этом случае на передающей стороне находится шифратор, а на приемной стороне — дешифратор. Соединительная линия в этом случае — многоканальная. Командные импульсы различаются по кодовым, частотным и временным признакам.
Последовательно-кодовая селекция применяется тогда, когда передаваемые команды состоят из групп импульсов, образующих соответствующий код, но импульсы из отдельных групп проходят поочередно, один за другим. Распределители на приемной и передающей стороне синхронизированы. Система связи, по существу, является одноканальной, но она обеспечивает практически одновременную передачу очень многих команд. Командные импульсы могут различаться по кодовым, частотным и временным признакам. Для всех этих случаев число признаков, характеризующих командный сигнал, равно двум, поскольку в дистанционном управлении моделями нас интересуют только два состояния: включено и выключено.
Более сложным вариантом схем дистанционного управления моделями являются так называемые цифровые и аналоговые системы.
Цифровые системы используют так называемую двоичную логику, в которой действуют переменные, принимающие только два состояния, обозначаемые через «0» и «1». Всевозможные релейные элементы (контактные, бесконтактные) являются двухпозиционными, так как они могут находиться в состоянии включено или же выключено. Включенное состояние реле или постоянное замыкание релейной электрической цепи обозначают «1», а выключенное состояние реле и постоянное разомкнутое состояние цепи — через «0». Соединяя друг с другом определенным способом отдельные элементы релейных схем, можно реализовать следующие логические действия: умножение, сложение и отрицание.
В технике дистанционного управления моделями применяются цифровые системы, построенные на основе конктактных реле (очень редко) и бесконтактных реле (полупроводниковые диоды, транзисторы, тиристоры и магнитные элементы). Они используются прежде всего в схемах многооперационного и пропорционального управления. Здесь требуемое движение руля задается последовательными сериями импульсов, которые затем считываются в приемном устройстве и теоретически могут обеспечить любую точность управления. Однако следует отметить, что схемы, встречающиеся в аппаратуре радиоуправления моделями, являются не вполне цифровыми схемами. Это скорее смешанные аналого-цифровые схемы.
Аналоговые схемы характеризуются тем, что действующие в них сигналы непрерывны (а не двухпозиционны, как описано выше). Аналоговые схемы встречаются в системах пропорционального управления, но значительно реже, чем цифровые.
В зависимости от режима управления рулями модели различают:
- дискретное управление, т. е такое, при котором нет промежуточных фиксированных положений (например, отклонение руля «от упора до упора»);
- каскадное управление, т. е. такое, при котором существуют промежуточные фиксированные положения (например, при отклонении руля его движение совершается скачками);
- пропорциональное управление (установочное или следящее), т. е. такое, при котором есть возможность полного повторения (слежения) рулем модели положений и перемещений колеса или ручки управления командного поста. Отклонения руля пропорциональны движениям командных рулевых элементов (манипуляторов), обслуживаемых моделистом-оператором.
В зависимости от числа обслуживаемых рулей или других механизмов в модели различают управление однооперационное и многооперационное.