
Телетехника знает много методов одновременной передачи информации, но лишь некоторые из них используются в радиомодельном деле. Рассмотрим их последовательно и детально, поскольку они представляют собой основу современных систем дистанционного управления моделями и перспективу развития этой области техники.
Принцип действия различных систем дистанционного управления можно легче всего понять, проследив путь сигнала — от ручки управления в передатчике до исполнительного механизма и руля в модели. Выделим на этом пути пять этапов:
- вход сигнала (движение ручки управления или замыкание кнопки на пульте передатчика);
- преобразование сигнала (в узле передатчика, где подготавливается определенный сигнал, для каждого движения исполнительного механизма, например звуковая частота);
- передача сигнала (модулятор и генератор ВЧ в передатчике— прохождение сигнала от передатчика до приемника — приемник с детектором и усилителем);
- воспроизведение сигнала (в узле приемника, где каждому определенному сигналу подчинен определенный исполнительный механизм, например, через резонансное реле);
- выход сигнала (движение исполнительного механизма или срабатывание соответствующего реле).
Когда мы говорим о сигнале, мы чаще всего подразумеваем сигнал НЧ, модулирующий несущую ВЧ передатчика. Как правило, это — амплитудная модуляция, но в некоторых очень редких случаях мы имеем дело с использованием в качестве сигнала немодулированной несущей (система пропорционального управления с вибрирующим рулем, любительские конструкции и т. п.).
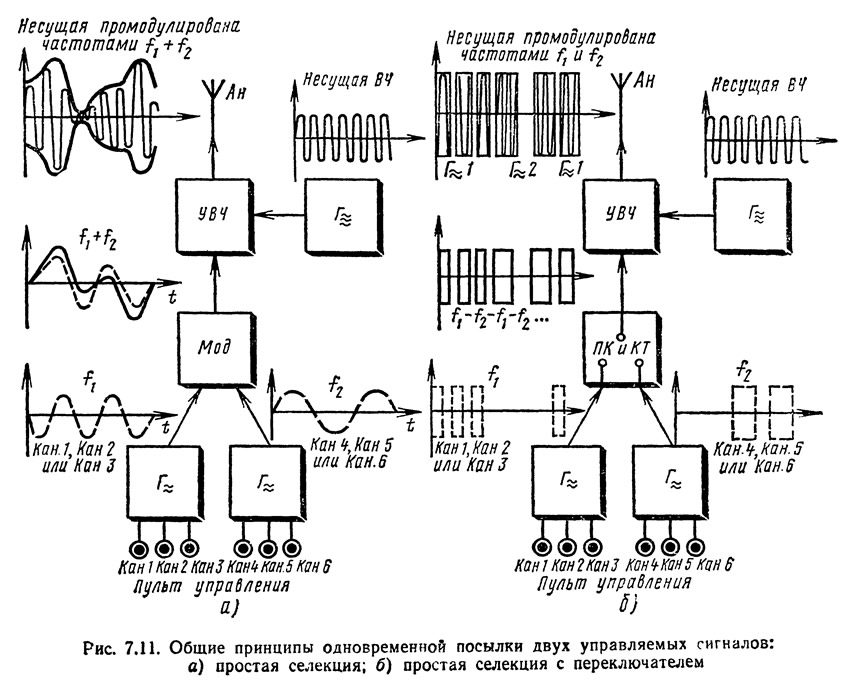
На структурных схемах, представленных на рис. 7.11, виден порядок формирования двух одновременных командных сигналов. Число выходов соответствует числу передаваемых команд. Однако передача сигналов от передатчика происходит только по одной соединительной линии (каналу), например, посредством несущей ВЧ передатчика.
Уже давно найден эффективный способ передачи нескольких сигналов на одной несущей ВЧ. Это были модулированные сигналы низкой частоты. Появились приемники с резонансными реле, а несколько позднее — с электрическими фильтрами. Тут отдельные звуковые частоты служат своего рода вспомогательной несущей, каждая из них образует собственный канал, хотя все звуковые частоты модулируют одну и ту же несущую ВЧ. Высокая частота выполняет теперь все более второстепенную роль «носителя», так как звуковые частоты невозможно передавать непосредственно и беспроволочно на большие расстояния.
Поскольку для каждого канала предусмотрена определенная и разная звуковая частота, то систему выбора этих сигналов называют частотной селекцией. При этом совершенно безразлично, происходит ли селекция в приемнике через вибрационное резонансное реле или через электрический фильтр. Однако это не все равно для эксплуатационника-радиомоделиста.
Структурная схема такой системы показана на рис. 3.1 ж. Частоты отдельных каналов могут передаваться поочередно или одновременно после замыкания кнопок, например, Кн1 и Кн2. Поочередная передача сигнала ничем не отличается от уже рассмотренных принципов, но одновременная передача двух и больше сигналов низкой частоты таит в себе много интересных проблем.
Одновременная передача двух различных звуковых частот посредством одной соединительной линии вовсе не означает, что эти частоты передаются независимо, как бы рядом друг с другом. Из физико-математических законов следует, что эти частоты накладываются друг на друга (суммируются), и в результате получается сумма амплитудных значений отдельных колебаний для каждого отрезка времени. Суммированные таким образом колебания поступают на приемник, где в дешифраторе (блоке фильтров) происходит выделение отдельных звуковых частот, следовательно, отдельных сигналов.
Так выглядит дело в теории и на практике, когда мы работаем с малыми частотами и короткими проводными соединениями. В нашем случае сигналы, передаваемые одновременно по радио на приемник в модели, могут оказаться совершенно отличающимися по форме от тех сигналов, которые вышли из передатчика. По пути эти сигналы могли подвергнуться искажениям. Может даже случиться, что информация, содержавшаяся в сигнале, станет непонятной для приемного устройства, а этого надо любой ценой избегать. Однако, с другой стороны, появление искажений тесно связано с основными свойствами системы передачи сигналов.
Искажения сигналов
Точность передачи сигналов управления зависит в большой степени от определенной, неизбежной нестабильности работы системы. Эти нестабильности зависят от влияния изменений температуры окружающей среды, а также от необходимости наличия постоянного радиоконтакта модели с оператором (на практике могут появиться так называемые мертвые зоны с кратковременной потерей связи). Такая кратковременная потеря связи не играет существенной роли в классическом многоканальном управлении, но при пропорциональном управлении это приводит к отклонениям руля, которые могут отрицательно влиять на правильный, спокойный ход полета.
Рассмотрим, что может случиться на пути управляющего сигнала (звуковой частоты или импульса) несущей ВЧ от передатчика к приемнику. Различают два вида искажений: нелинейные и линейные.
Нелинейные искажения
Нелинейные искажения происходят на криволинейном (следовательно, нелинейном) участке рабочей характеристики электронного элемента, например полупроводникового диода. При питании диода синусоидальным напряжением получим только положительные полупериоды. Следовательно, часть подаваемого на диод сигнала может быть сразу же подавлена или даже подвергнуться полному искажению. Для сравнения укажем, что резистор является линейным элементом, не вызывающим искажения. Подаваемое на него напряжение питания сохраняет на выходе свою форму, оно только несколько ослаблено.
Искажения форм, происходящие в нелинейных системах передачи (например, диодах), вообще необратимы, а кроме того, они происходят уже при чистых синусоидальных колебаниях. Однако их можно компенсировать путем соответствующего изменения характеристики на приемной стороне. Поскольку этот метод зависит в большой степени от уровня сигнала, который при линейных искажениях не играет никакой роли, то коррекция искажений удается только в отдельных случаях.
Нелинейные искажения вызывают также образование новых частот вследствие смешивания частот управления. Это может иметь вредное влияние, например, на работу многоканального приемного устройства. С другой стороны, принцип смешивания на изгибе характеристики практически используют в супергетеродинных приемниках для дистанционного управления, чтобы можно было из рабочей частоты и частоты гетеродина выделить промежуточную частоту.
Линейные искажения
Подобно упомянутому уже резистору ведут себя другие пассивные элементы: конденсаторы, катушки и трансформаторы. Проходящий через них синусоидальный сигнал (ток) сохраняет свою форму на выходе, а величина ослабления зависит от его частоты. Конденсатор, например, оказывает тем большее сопротивление переменному току, чем меньше частота этого сигнала.
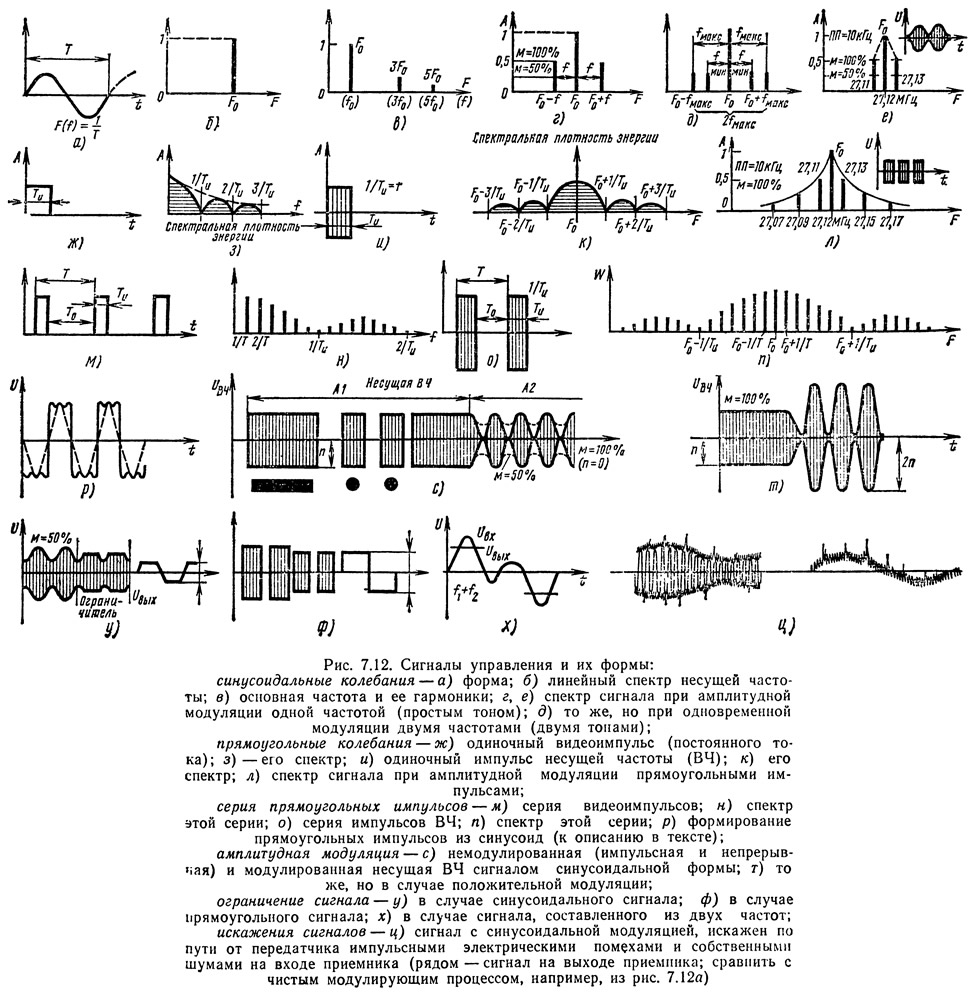
Теперь рассмотрим, почему ослабление сигнала, зависящее от частоты, тоже вызывает искажения. Если вместо чистого синусоидального сигнала мы имеем сигнал, составленный, например, из двух звуковых частот — f1 и f2 (см. рис. 7.11 а), го эти частоты, хотя они переносятся как суммарные колебания, одновременно подвергаются индивидуальным ослаблениям в передающем устройстве в зависимости от их частоты. Если, например, суммарные колебания проходят через конденсатор, то меньшие частоты f2 будут больше ослаблены, чем большие f1, и на выходе получим линейно искаженные суммарные колебания (пунктирная линия, в отличие от сплошной линии).
Следует добавить, что хотя линейные системы передачи тоже могут искажать форму сигнала, они все же по-разному ослабляют отдельные звуковые частоты, содержащиеся в сложном сигнале управления. Эти частоты не изменяются, и не возникают также новые частоты. Применяя соответствующие дополнительные схемы в приемном устройстве, можно почти всегда восстановить отдельные частоты сложного сигнала в неискаженном виде.
Простая частотная селекция
Сигналы низкой частоты, поступающие на модель, подвергаются по пути искажениям в каскадах низкой частоты передатчика, на входе приемника и в его усилителе низкой частоты (см. рис. 7.11). О видах этих искажений мы уже говорили. Ввиду небольшого расстояния между передатчиком и приемником больше не происходят искажения, вызываемые атмосферными помехами и т. п. Но зато могут иметь место искажения, вызываемые помехами со стороны других работающих передатчиков, и это чаще всего вызывает полный отказ работы сверхрегенеративных приемников.
При модуляции ВЧ сигнала передатчика двумя одновременными сигналами появляются нелинейные искажения, а это влечет за собой потерю части информации в сигнале. Поэтому в сверх-регенеративном приемнике после детектирования получится искаженный сигнал. В супергетеродинном приемнике на выходе будет менее искаженный сигнал из-за узкой полосы пропускания. Помимо этого, линейные отклонения можно скомпенсировать. И в сверхрегенеративных приемниках иногда происходят линейные искажения. Поэтому применяют низкочастотные фильтры, чтобы отделять частоты шума сверхрегенерации и частоты гашения от входа усилителя НЧ. Это вызывает резкое подавление больших частот сигнала, что часто приводит к понижению чувствительности приемного устройства при работе на высоких частотах канала НЧ, но сверхрегенеративные приемники не имеют при этом искажений выходного сигнала.
Большие нелинейные искажения происходят главным образом в усилителях НЧ приемников. В сверхрегенеративных приемниках, которые хотя и не имеют автоматического регулирования усиления, но имеют свойственную им способность к уменьшению влияния колебаний напряженности электромагнитного поля, может иметь место при работе вблизи передатчика перегрузка усилителя НЧ и в результате этого — ограничение уровня сигнала на выходе.
Во многих случаях это ограничение необходимо, если желательно предотвратить одновременное действие нескольких резонансных реле с электрическими фильтрами при посылке одного только сигнала с близкой частотой. Из синусоидальных колебаний получаем за ограничителем трапецеидальные или прямоугольные колебания. Это вообще не мешает в случае поочередной посылки управляющих сигналов, если, само собой разумеется, образующиеся при этом гармонические частоты не будут в состоянии вызывать срабатывание других резонансных реле с электрическими фильтрами. Этого можно избегать путем тщательного подбора звуковых частот для отдельных каналов.
Ограничение сложного сигнала означает (рис. 7.12), прежде всего, потерю высших частот. Именно поэтому при управлении моделью со сверхрегенеративным приемником, находящимся вблизи передатчика (когда мы применяем управление одновременно с простой частотной селекцией), приходится иногда временно укорачивать длину передающей антенны, чтобы предотвратить перегрузку приемника и получить правильную работу дешифратора. Нет надобности добавлять, что такое одновременное управление, зависящее от дальности, не всегда может нас удовлетворить.
Иначе обстоит дело с супергетеродинными приемниками. Хотя эти приемники благодаря наличию у них системы автоматического регулирования усиления могут позволить более правильный прием одновременных сигналов, все же и тут чаще всего применяют элемент ограничителя в УНЧ. И вот почему: вследствие перегрузки получается некоторый запас надежности от помех со стороны передатчиков, работающих на немодулированной несущей ВЧ. Далее это дает постоянный уровень выходного напряжения, достигаемый очень простыми средствами. Поскольку быстролетающие модели (например, высшего пилотажа) создают условия для резких и больших колебаний напряженности электромагнитного поля, другие способы регулирования напряжения выходного сигнала, основанные на использовании динамических свойств, становятся совершенно неприемлемыми, так как затраты были бы слишком большими по сравнению с достигаемым результатом.
О том, что несмотря на происходящие искажения возможна надежная работа управляемых устройств одновременно на двух каналах низкой частоты с LC-фильтрами, свидетельствует пример прежнего варианта восьмиканального аппарата заводского изготовления фирмы Grundig «Variophon-Varioton». Тут принцип несколько изменен, так как ограничение отдельных звуковых частот составного сигнала происходило уже в передатчике перед их смешиванием. Два прямоугольных сигнала с различными частотами затем смешивались. Образовался циклически изменяющийся составной пульсирующий сигнал, в котором, помимо различных случайных побочных частот смешивания, находились также обе основные частоты сигналов управления НЧ. Поскольку модулированный сигнал ограничен уже в передатчике, то его дальнейшее ограничение в приемнике не представляло трудности.
Выходное напряжение УНЧ в приемнике, управляющее резо-нанснььми реле, LC-фильтрами, непостоянно и зависит от двух различных режимов работы — поочередного или одновременного. Этот факт, а также наличие случайных эффектов смешивания вынуждают, с одной стороны, точно устанавливать уровень напряжения, управляющего резонансными реле с LC-фильтрами, а с другой стороны — очень тщательно разделять модулирующие частоты отдельных каналов НЧ (чтобы ни одна из случайных частот, образующихся в результате смешивания, не попадала в рабочую частоту какого-либо фильтра).
В устройствах с одновременной посылкой трех управляющих частотных сигналов еще более сильно заметны колебания выходных напряжений между поочередной (последовательной) и одновременной передачей. Поэтому такие решения принимают очень редко, преимущественно в устройствах с резонансными реле, которые благодаря большой селективности отдельных каналов допускают резкую перегрузку составным сигналом НЧ.
Остается теперь рассмотреть практическую проблему того, как двумя или тремя различными звуковыми частотами промодулировать одновременно несущую частоту ВЧ.
Когда надо посылать одновременно два сигнала НЧ, то следует обращать внимание на то, чтобы ни один из них в отдельности не промодулировал в 100% несущей ВЧ, а только в 50%. При трех одновременных сигналах каждый из них может промодулировать несущую только на 33%.
Результатом этого являются ухудшение коэффициента полезного действия передатчика и уменьшение дальности его эффективного действия. Следовательно, во-первых, каскад ВЧ передатчика потребляет значительную электрическую мощность и тогда, когда не посылается ни один сигнал НЧ (команда). Эта мощность расходуется бесцельно. Во-вторых, глубина модуляции 50 или 33%-ная приводит к тому, что выделенное после детектирования в приемнике фактическое напряжение НЧ соответственно меньше. Кроме того, как в передатчике, так и в приемнике приходится нередко применять упомянутые уже блоки, ограничивающие амплитуду выходного сигнала НЧ (так называемые ограничители), вследствие чего потери в эффективности модуляции еще больше увеличиваются. По этим соображениям одновременная модуляция несущей ВЧ несколькими синусоидальными сигналами НЧ не является самым лучшим решением для наших целей.
Применение модуляции прямоугольными формами НЧ дает большую эффективность (см. рис. 7.12) только в случае неодновременной посылки нескольких команд. Дело в том, что прямоугольная модуляция не подходит для классических схем с одновременной простой селекцией сигналов, хотя она и применялась раньше в известных аппаратах заводского изготовления Orbit с резонансными реле. Однако имеются другие решения, дающие эффект одновременного управления моделью несколькими командами.
Что касается практической стороны вопроса, то прежде всего необходимо рассмотреть следующие два момента: сколько команд и какие именно команды надо посылать одновременно. Разумеется, это зависит от типа радиомодели. Самыми лучшими в техническом отношении являются устройства для дистанционного управления летающими моделями, а потому попробуем рассмотреть проблему на примере таких моделей. В простых трехпозиционных устройствах (регулирование руля направления, руля высоты и приводного двигателя) достаточно одновременное обслуживание двух органов. В устройствах с 4—12 и большим числом операций желательна возможность одновременной посылки трех команд.
Решение вопроса о том, какие именно команды необходимо посылать одновременно, сказывается на техническом решении схемы. Если требуется, чтоб одновременно можно было посылать любые комбинации команд, что в некоторых случаях применяется для плавающих моделей (стартующих в классе многокомандных моделей или в моделях для эффективной демонстрации), то каждая команда должна иметь отдельный генератор звуковой частоты. Однако в остальных случаях, особенно в отношении летающих радиомоделей, достаточна значительно более простая группировка команд. Тут нет надобности высылать одновременно команду: руль направления влево и руль направления вправо или руль высоты вниз и руль высоты вверх. Поэтому все командные операции, которые нет надобности посылать одновременно, группируют при отдельных генераторах НЧ с переключаемыми модулирующими частотами.
Одним из них является так называемая схема с переключателем модуляции, имеющая некоторое сходство с принципом временной распределительной селекции. В этом решении отдельные командные операции тоже передаются с помощью определенных НЧ, но они не модулируют одновременно несущей ВЧ, а подаются на каскад ВЧ передатчика поочередно в определенном ритме.
Одновременное двухоперационное управление
На рис. 7.11 б представлена структурная схема системы для одновременного двухоперационного управления. Два генератора НЧ включаются кнопками Кн1—Кн6. Переключатель подает попеременно сигнал то от одного, то от другого генератора на оконечный каскад передатчика (трапецеидальная или прямоугольная модуляция). Выходной сигнал от передатчика выглядит примерно так, как на рис. 7.11 б. Если один из генераторов НЧ будет выключен, то в выходном сигнале появится в этом месте пауза.
С помощью такого простого метода можно использовать все описанные выше преимущества трапецеидальной или прямоугольной модуляции и одновременно обслуживать два руля в модели. Надо только найти соответствующий переключатель.
Им может быть, например, электрический микродвигатель со скользящим щеточным контактом, переключающий контакты, расположенные радиально. Это может быть и реле. Оба эти решения имеют такие недостатки: частота переключения ограничена 25 Гц, контакты должны иметь очень высокое качество, переключатели потребляют ток непрерывно независимо от того, посылаются ли две команды одновременно или нет, действительно удовлетворительные результаты могут достигаться только при использовании дорогих телеграфных реле и, наконец, при этом происходит сравнительно быстрый механический износ, что диктует необходимость постоянного контроля и регулирования переключателя.
Лучше использовать электронный переключатель на транзисторах. Перечислим его достоинства: долговечность практически неограниченная, небольшой расход тока, переключение бесконтактное, очень большая частота переключения и, наконец, малые габариты и масса. Таким почти идеальным переключателем является мультивибратор.
Схема блока передатчика с переключателем, двумя генераторами НЧ и модулятором приведена на рис. 3.4 в. Каждый генератор может обслуживать три или четыре канала низкой частоты (команды). Конденсаторы С определяют частоту переключения. Это должны быть стирофлексные или бумажные металлизованные (неэлектролитические!) конденсаторы с одинаковой величиной емкости. Дроссель Др1 служит для температурной стабилизации модулятора 400 витков провода диаметром 0,1 мм на ферритовом броневом сердечнике диаметром 104-14X64-8 мм (индуктивность дросселя около 0,1 Г). От него зависит форма выходного сигнала.
Разумеется, описанный принцип одновременного двухоперационного управления можно преобразовать в одновременное трехоперационное управление, использовав электронный кольцевой переключатель. Тогда период (время) передачи должен быть разделен на три равные части. Каждый генератор НЧ будет иметь «в своем распоряжении» только одну треть этого времени, как и каждое резонансное реле в приемнике. В остальном интервале двух третьих этого времени реле выбранного канала должно оставаться включенным (например, благодаря электрическим схемам замедления).
Таким образом, реле «не будет чувствовать», что сигнал НЧ «прерывистый». Однако, чтобы можно было управлять моделью довольно быстро, частота переключения каналов должна быть очень большой по сравнению со скоростью движения руля (как правило, равной 200—300 Гц). Схема такого переключателя приведена на рис. 14.11 а. Следует добавить, что если переключатель для одновременного двухоперационного управления можно проверить и наладить только с помощью головных телефонов (наушников), то переключатель для трехоперационного управления налаживается с помощью осциллографа и других точных электроизмерительных приборов.
Возвращаясь к предыдущему решению, скажем, что высокоомные телефоны включают между зажимами X и «+» (см. рис. 3.4 в). Заменяя временно конденсаторы С электролитическими конденсаторами («плюс» на стороне базы Т3 и Т4) емкостью 10 мкФ, мы услышим работу переключателя, включающего попеременно с частотой 3—5 Гц то один, то второй сигнал низкой частоты от обоих генераторов. В момент выключения одного сигнала в телефонах появится резко выраженная пауза.
На рис. 3.5 в приведена схема упрощенного модулятора с двумя генераторами звуковой частоты и переключателем с рабочей частотой около 300 Гц. В этой схеме надо обязательно использовать четыре кремниевых транзистора. Остальные могут быть германиевыми.
Передатчик, снабженный переключателем модуляции (двухпозиционным или трехпозиционным), посылает в приемник прерывистые сигналы, поэтому для устойчивой работы реле в приемнике его обмотку шунтируют конденсатором. Это правило относится к работе с передатчиками, снабженными как контактными переключателями (с частотой около 20 Гц), так и бесконтактными переключателями (частотой около 200—300 Гц).
На рис. 6.6 а и рис. 6.7 б показаны схемы LC-фильтров, снабженные блокирующим конденсатором.
Времяраспределительная селекция
Системы с времяраспределительной селекцией используют для передачи команд интервалы времени между импульсами. Отдельные командные импульсы посылаются не одновременно, а поочередно (последовательно). Для передачи последовательности импульсов необходима только несущая ВЧ.
Простейшим принципом построения таких схем является схема «старт-стоп», применяемая в телетайпах. Такая система имеет шаговые распределители — селекторы, синхронно связанные друг с другом и выполняющие одновременно полный поворот при каждой посланной команде. Поскольку селекторы передатчика и приемника останавливаются всегда в одном и том же положении, то система всегда готова к работе. В телетайпах можно с помощью только семи импульсов включить в работу независимо друг от друга 32 буквы алфавита, пользуясь лишь одним соединительным каналом. Разумеется, отдельные посылаемые импульсы несколько смещены во времени, но умещаются все во время одного полного оборота распределителя и при достаточно большой скорости этого оборота они практически одновременны. Кнопки различных каналов могут одновременно замыкаться на передающем посту. В устройствах «старт-стоп» скорость вращения распределителей равна 7,5 об/с.
В технике дистанционного управления моделями применяют телефонные распределители (номеронабиратели) со скоростью вращения, например, 2 об/мин, так что посылка соответствующей команды длится значительно дольше, что полностью удовлетворяет требованиям водных и колесных радиомоделей. Однако изготовление радиомодельной системы «старт-стоп», основанной на механическом принципе, требует применения синхронных двигателей и специальной синхронизации. Поэтому такие устройства встречаются довольно редко, главным образом в больших плавающих и колесных моделях.
В последние годы принцип «старт-стоп» устарел, когда в радиомоделизме появились цифровые схемы, элементы логических функций и особенно, когда появились полупроводники. Этот вид передачи сигналов позволяет одновременно обслуживать не только несколько избранных каналов, а буквально все.
Преимущества посылки сигналов в системе время-распредели-тельной селекции очевидны. Поскольку каждая канальная частота передается поочередно (раздельно), то ограничение амплитуды и искажения (имеющиеся на общей соединительной линии) не оказывают большого влияния на составной сигнал — кажущийся одновременным. Нет и взаимных (отрицательных) влияний, о которых говорилось при описании случая простой частотной селекции. В принципе, эта система нечувствительна к колебаниям амплитуды выходного сигнала. Важны тут только минимальные уровни сигнала, при которых реле должно срабатывать. Если уровень сигнала будет слишком малым, то реле не сработает, канал не будет включен, но при этом и не будет возникать ошибочной канальной информации.
Возможен еще один вариант этой системы управления, а именно применение только одной единственной несущей ВЧ вместо различных звуковых частот сигналов. Тогда отдельные канальные сигналы будут состоять из импульсов несущей ВЧ. Чтобы эти импульсы имели признаки, отличающие их друг от друга (раньше они имели частотные признаки), надо применять соответствующее размещение этих импульсов во времени (временные признаки). Этот метод селекции будет детально рассмотрен в параграфе 7.3.
Подытоживая сказанное выше, можно заключить, что одновременная (параллельная) передача частотных сигналов в системах простой селекции ближе в отношении чувствительности к колебаниям амплитуды к аналоговой технике. Поочередная же (последовательная) передача сигналов во времяраспределительной системе селекции ближе к управлению в цифровой системе. В этом последнем случае искажения амплитуды сигнала не играют никакой роли, так как тут для нас важны только временные зависимости и различение в данных моментах времени состояний «Включено—Выключено». Однако при рассмотрении этих решений мы еще не говорили о синхронизации между передатчиком и приемником — основной проблеме в каждой системе времяраспределительной селекции. Поэтому нам необходимо заняться рассмотрением импульсной техники.