
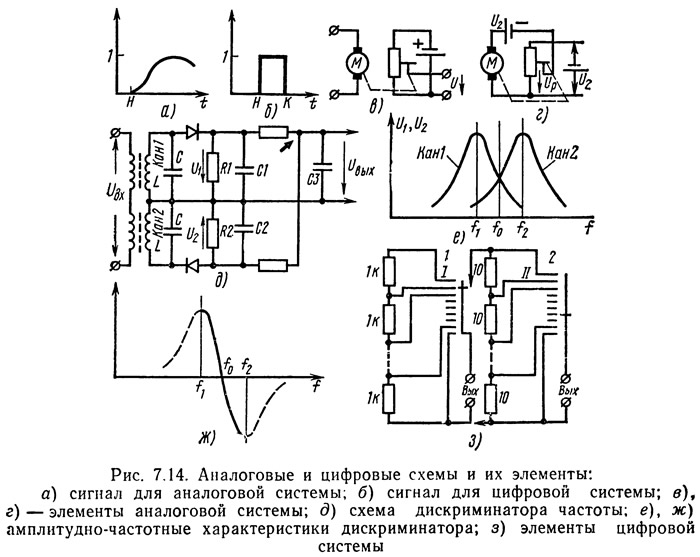
На рис. 7.14 в показан электрический микродвигатель, вал которого связан с потенциометром, а поворот этого вала одновременно вызывает движение руля в модели. Каждое положение исполнительного микродвигателя, следовательно, и руля может быть определено путем измерения сопротивления в месте нахождения скользящего щеточного контакта потенциометра. Следовательно, отклонение руля преобразуется в аналоговую величину (сопротивление). Когда через потенциометр течет ток, то падение напряжения на нем является аналоговой величиной для угла поворота управляющего микродвигателя.
Можно поступить наоборот, т. е. подавать на потенциометр постоянное напряжение, и тогда напряжение, снятое его скользящим щеточным контактом, будет величиной, определяющей отклонение руля. При этом важно иметь возможность непрерывно (плавно) регулировать эту величину.
Однако на практике точность установки руля имеет свои технические пределы. Если, например, используется проволочный потенциометр, то наибольшее значение угла поворота управляющего двигателя зависит от числа витков проволочного сопротивления. Если потенциометр имеет 100 витков, то можно иметь только 100 различных промежуточных значений сопротивления. Если угол поворота оси этого потенциометра равен 270°, то получаем наименьшее угловое изменение руля 2,7°/270°:100=2,7°. Иначе говоря, угловое регулирование управляющего двигателя или руля произойдет под влиянием изменений сопротивления, тока или напряжения лишь тогда, когда вал двигателя повернется на 2,7°.
Отсюда следует, что в аналоговых схемах следует применять проволочные потенциометры с возможно большим числом витков, что дает увеличение точности регулирования промежуточных положений руля. Попытки замены проволочного потенциометра непроволочным не дали идеального решения, поскольку имеются большие технологические трудности создания постоянного слоя сопротивления с равномерным распределением. В этом случае одни и те же угловые перемещения скользящего щеточного контакта дают каждый раз различные изменения сопротивления.
Типичным примером аналоговой системы управления является часто применявшаяся в последние годы система пропорционального управления с переменными модулирующими частотами. Ручка управления в передающем устройстве связана в такой системе с потенциометром, являвшимся элементом перестройки генератора звуковой частоты. При перемещении ручки управления изменялась модулирующая частота, являвшаяся аналогом отклонения ручки управления и связанная с ней пропорциональной зависимостью.
Модулирующая частота преобразуется в дискриминаторе приемника в пропорционально изменяющееся напряжение, питающее управляющий микродвигатель (рис. 7.14 г). Входное напряжение дискриминатора u2. Часть этого напряжения up снимают с потенциометра и подводят через источник u1 на управляющий микродвигатель. Последний работает до момента, когда напряжение up станет равным u1 после этого он останавливается, а вместе с ним прекращает свое движение и руль модели.
Если при этом подвинуть ручку управления в передающем устройстве, то изменяется выходное напряжение u2 в дискриминаторе приемника, и управляющий микродвигатель снова начнет работать. При этом исполнительный механизм будет перемещать движок потенциометра до того момента, пока снова не будет удовлетворено условие up=u1. Следовательно, руль модели будет повторять каждое движение ручки управления. Подытоживая сказанное, можно констатировать, что механическое движение ручки управления в передатчике преобразуется сначала в электрический сигнал (модулирующая частота, выходное напряжение дискриминатора), а затем снова в механическое перемещение, а именно — в пропорциональное отклонение руля модели.
В этом заключается основной признак аналоговой системы электрического управления: в начале и конце процесса действуют механические перемещения, но их передача происходит с помощью аналоговых электрических сигналов. Для сравнения укажем, что в моделях, летающих на привязи, механические перемещения управления передаются непосредственно через механический промежуточный элемент — привязные тросики.
Возвращаясь к дискриминатору, добавим, что даже самые малые изменения напряжения u2 вызывают движение руля. Однако эти изменения вовсе не обязательно вызываются движениями ручки управления в передатчике. Нередко достаточно увеличить расстояние между передатчиком и приемником, чтобы произошло падение выходного напряжения дискриминатора и следующее за этим ошибочное движение руля. Даже напряжение u1 (получаемое от батареи, питающей приемник) влияет на работу схемы; падение этого напряжения вызывает во время полета самопроизвольное перемещение руля. Подобный результат дает влияние изменения температуры на полупроводниковые приборы в приемнике (диоды, транзисторы и т. п.).
Эти случайные изменения отклонений руля можно компенсировать во время полета с помощью небольших подстроек генераторов звуковой частоты в передатчике так называемыми балансирующими воротами-триммерами. Однако в пропорциональном управлении важно не это.