
Поскольку у этой системы управления нет установленного нейтрального положения руля, то это позволяет в любой момент осуществлять текущую корректировку, например, полета по прямой. В случае отказа аппаратуры модель может разбиться, так как руль отклонится в крайнее положение. Для устранения этого недостатка используют дополнительные защитные схемы (см. рис. 6.9 а).
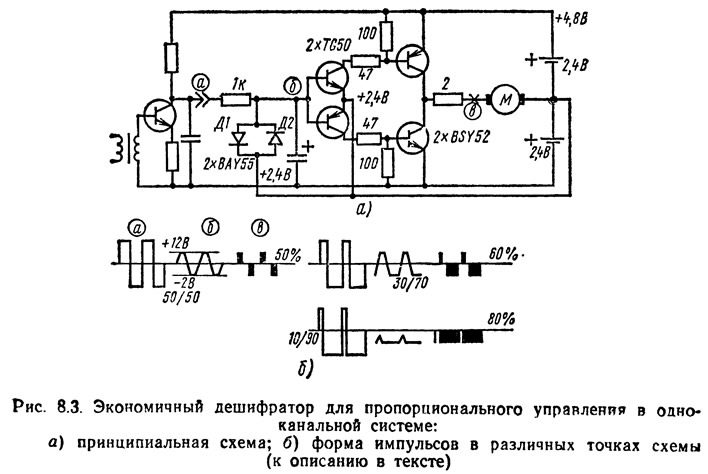
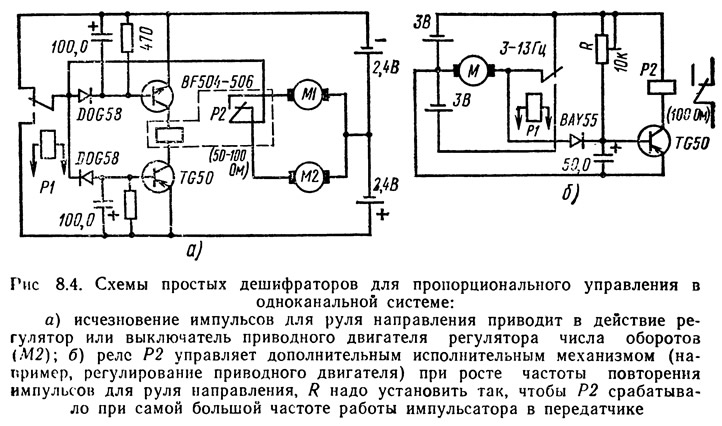
Эту систему можно использовать в двухканальных аппаратурах с классическим исполнительным механизмом. В таких системах регулируется частота посылки сигналов управления первого или второго канала, что позволяет плавно управлять исполнительным механизмом, который при отсутствии сигнала находится в нейтрали. На рис. 8.2—8.4 приведены схемы приставок для одноканальных систем управления. Рассмотрим теперь несколько способов одновременного пропорционального управления с помощью одного или двух рулей в модели и с возможностью включения дополнительных операций.
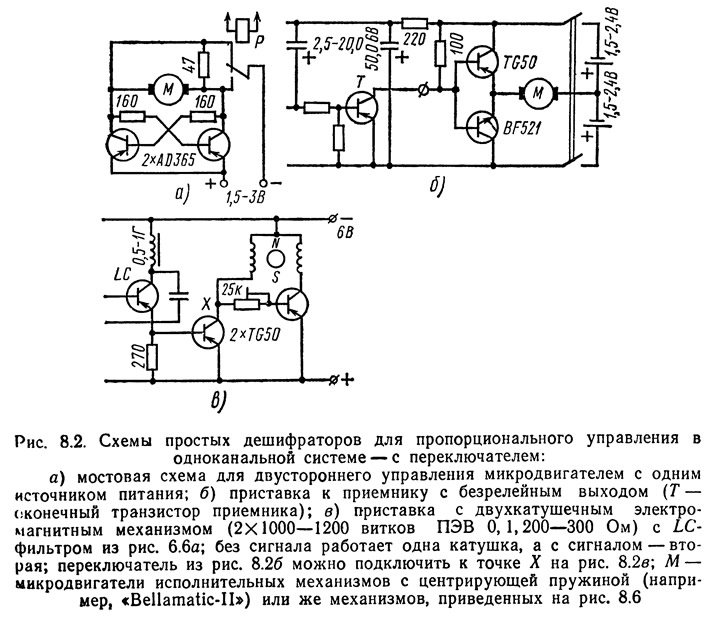
Одноканальные системы
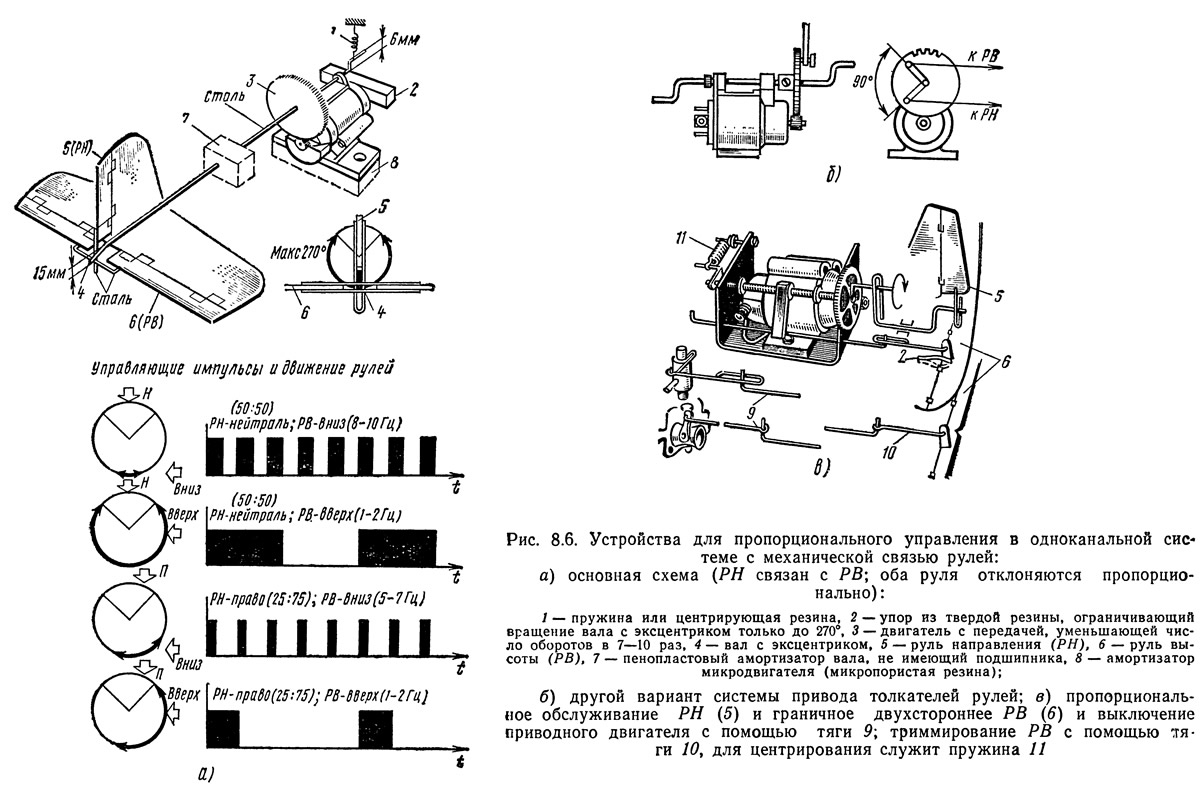
На рис. 8.6 приведены примеры механических связей, позволяющих производить одновременное пропорциональное управление двумя элементами в летающих моделях. Устройства этого типа подходят для малых и легких моделей с размахом крыльев до 1,5 м. В передающих устройствах особое внимание надо обращать на независимую работу мультивибратора в полном диапазоне изменений обоих регуляторов (отношения пауза/импульс и частоты повторения импульсов); в приемниках надо следить за передачей импульсных сигналов без искажений, а также за установкой на всех контактах искрогасителей.
Рассмотрим теперь широко распространенный в последние пять лет составной исполнительный механизм для одновременного пропорционального управления двумя рулями в модели и ступенчатого управления двигателем в одноканальной системе. Механизм LR-3 показан на рис. 8.5 а.
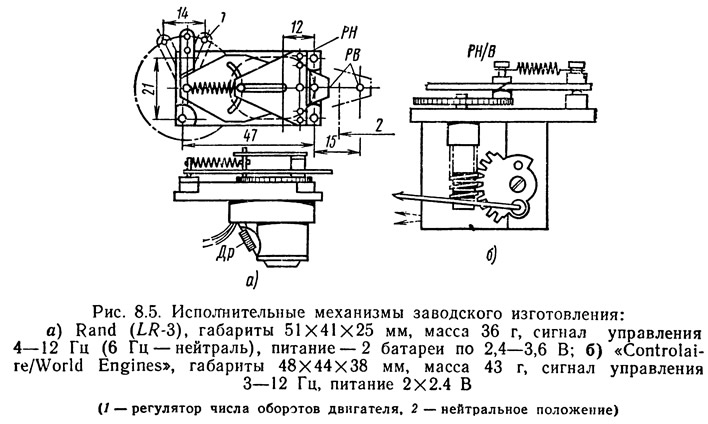
Электрический микродвигатель «Mitsumi» приводит в движение через передачу диск с шипом, центрируемый спиральной пружиной. Шип приводит во вращательное движение рычаг, соединенный качалкой с рулем направления, кроме этого, диск соединен качалкой с рулем высоты. Регулятор числа оборотов двигателя на модели тоже соединяется с рычагом, который приводится в движение непосредственно от микроэлектродвигателя, изменяя частоту посылки импульсов на исполнительный механизм LR-3. Для руля высоты частота следования импульсов изменяется от 4 Гц (вверх) — 6 Гц (нейтраль) до 12 Гц (вниз). Наличие модулированного сигнала — большой газ, его отсутствие — малый газ. Существует много исполнительных механизмов подобного типа, но описанный выше является наиболее типичным, надежным и развивающим довольно большую управляющую силу.
Ток, потребляемый механизмом LR-3 при переходе из одного крайнего положения в другое, может достигать 1,5 А.
Среднее потребление тока при напряжении 2,4 В (питание от батарей напряжением 4,8 В с отводом в центре) равно 100 мА для руля направления и 150 мА для руля высоты. Кадмиево-никелевый аккумулятор емкостью 225 мА·ч достаточен на 1 ч полета. Аккумулятор имеет габаритные размеры 25X41X51 мм, массу — 36 г.
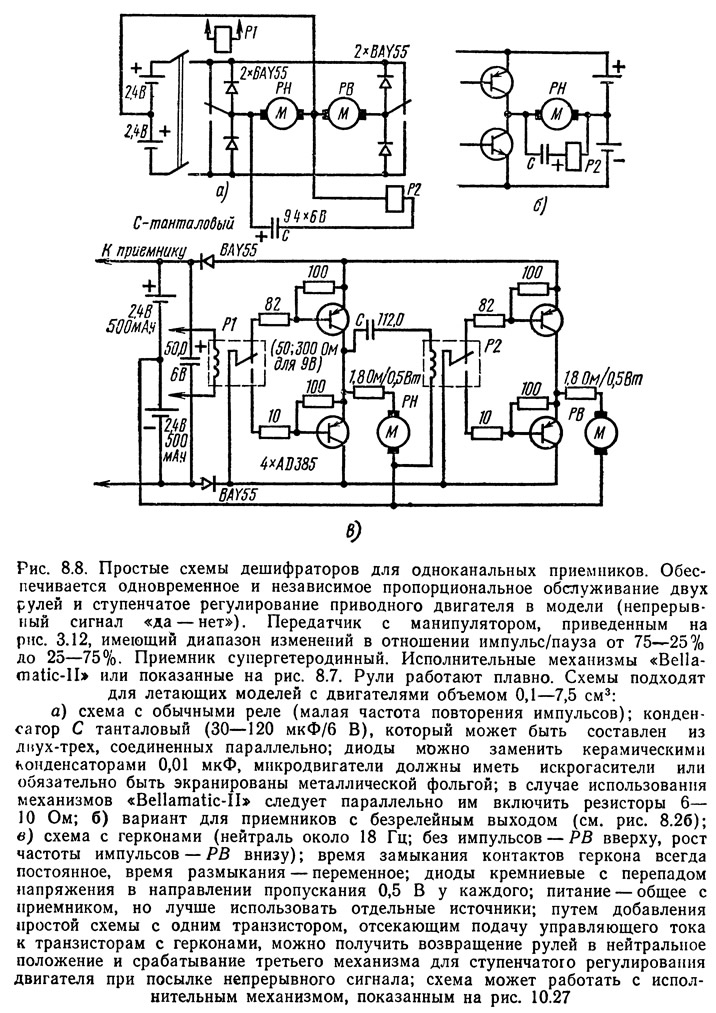
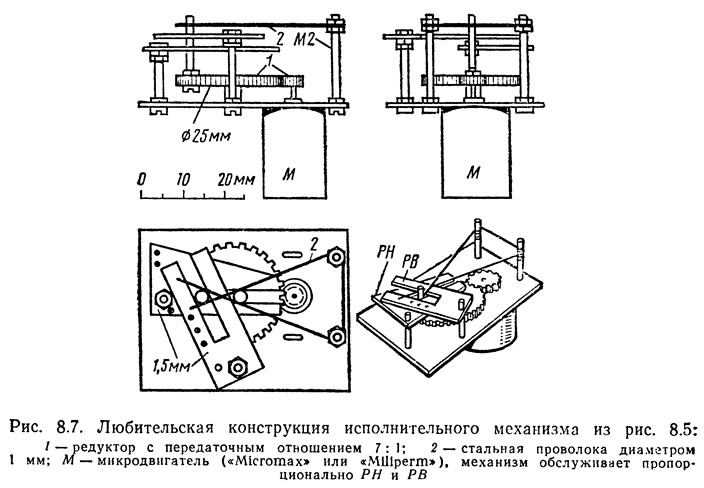
Любительский вариант механизма LR-3 приведен на рис. 8.7. Для управления рассмотренными выше устройствами применяются электронные схемы, представленные на рис. 8.8. Исполнительные механизмы с такими схемами приближаются к полному пропорциональному управлению и, несмотря на свою простоту, позволяют получать высокие результаты с не слишком быстрыми и легкими моделями, имеющими размах крыльев до 1,6 м. Исполнительные механизмы в них тоже простые (см. рис. 10.2), центрируемые пружиной или резиновой лентой.
Лучшие результаты можно получить при использовании исполнительных механизмов пропорционального действия. Простейшие из них могут взаимодействовать почти с любым одноканальным приемником. Движения руля у них уже не колеблющиеся, а плавные.
Многоканальные системы
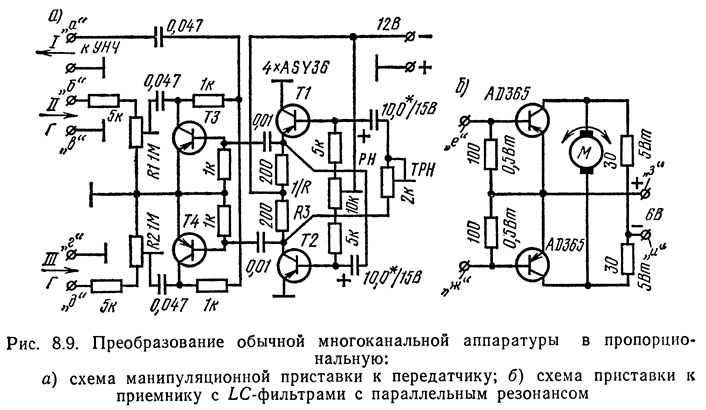
Если, например, дополнить четырехканальный (дискретный) передатчик простым переключателем (рис. 8.9 а), то он превратится в передатчик для пропорционального управления. Добавляя в этот передатчик и в приемник соответствующие узлы — шифраторы и дешифраторы (рис. 8.9 б), мы сможем получить многократное увеличение числа управляемых операций.
Рассмотрим вкратце способы практического преобразования обычного дискретного многоканального устройства с электрическими фильтрами или резонансными реле и с обычными трехпозиционными исполнительными механизмами в простое устройство для пропорционального управления.
Передатчик для этого дополняют импульсатором — мультивибратором, который включается с помощью дополнительной кнопки. В нормальном процессе осуществляют управление рулями дискретно с помощью ручек управления или микровыключателей. Если требуется получить промежуточные отклонения руля, помимо соответствующего движения ручки управления, то нажимают также кнопку импульсатора. Тогда исполнительный механизм не будет сразу попадать в крайнее положение, а будет перемещаться скачками. Одновременно аэродинамический напор на руль уменьшит скорость его движения, и таким образом на практике получится эффект плавного управления. Скорость и диапазон отклонений руля будут зависеть от отношения величины паузы к длительности импульса (это отношение может регулироваться потенциометром в мультивибраторе). Один и тот же импульсатор обслуживает все рули в модели, а выключение его вызывает немедленное возвращение исполнительных механизмов в первоначальное состояние.
Для приемников с резонансными реле частота повторения импульсов должна регулироваться от 1 до 7 Гц, а отношение пауза/импульс — от 10 до 90%. В качестве исполнительных механизмов хорошо работают приборы «Bellamatic-II».
Другой способ — это преобразование трехпозиционного механизма с электрическим центрированием в пятипозиционный, что также дает эффект, близкий к пропорциональному управлению. Принцип конструкции показан на рис. 9.7 в. В этом решении отдельный триммер руля высоты излишен. Еще один способ — применение импульсатора (см. рис. 3.12).
Преобразование обычного многоканального устройства с электрическими фильтрами, например «Variophon-Varioton», в систему цифрового пропорционального управления дано на рис. 8.9. В передатчике отключают ручку управления и все провода, соединяющие генераторы звуковой частоты с усилителями НЧ. Два провода, идущие от генераторов звуковой частоты, подключают к зажимам б и д. Зажим а идет к усилителю НЧ, а зажимы в и г — к источнику питания. Таким образом, к импульсатору подводятся два звуковых канала. В приемнике отключают все провода от последнего транзистора УНЧ в LC-фильтре к исполнительному механизму, реле и т. п. К эмиттерам транзисторов двух каналов низкой частоты подключают систему со схемой рис. 8.9 б, соединяя с эмиттерами зажимы е и ж. Зажимы з и и соединяют с плюсом и минусом (напряжение 6 В).
Аналогично поступают с остальными каналами. Каждый исполнительный механизм обслуживается двумя каналами низкой частоты, причем все они питаются от одного и того же источника тока. Исполнительные механизмы могут иметь любые микроэлектродвигатели постоянного тока напряжением 6 В.
При испытании включают передатчик и приемник. Если теперь пустить в ход потенциометр R3 (ручка управления), то исполнительный механизм повторит его отклонение и остановится в том положении, в котором мы установим ручку управления, которую может заменить вороток или рычаг, прикрепленный к оси потенциометра.