
Следующим важным признаком цифровой системы пропорционального управления является способ использования информации исполнительными механизмами. В аналоговой системе ширина или частота импульсов сначала преобразуется в переменные значения постоянного тока, а затем подается на исполнительные механизмы. В цифровой системе импульс остается без изменения и сразу же сравнивается со стандартным импульсом, выработанным внутри исполнительного механизма. Разница в ширине этих сравниваемых импульсов является сигналом ошибки (погрешности), приводящей к тому, что микроэлектродвигатель исполнительного механизма начинает работать, регулируя потенциометр обратной связи так, чтобы согласовать свое положение с входным сигналом, поступающим от передатчика.
В так называемой чистой цифровой системе двоичное число передается прямо на исполнительный механизм, где электрический микродвигатель, вместо того чтобы регулировать потенциометр обратной связи, сразу приводит в движение переключатель дешифратора. Вместо микродвигателя постоянного тока такой исполнительный механизм может иметь шаговый приводной механизм. Точность управления исполнительными механизмами данного типа может достигнуть 1%.
В радиомодельных цифровых системах сигнал, содержащий информацию об управлении, чаще всего образуется в схеме изменения ширины импульса, преобразуется потом, например, в сигнал фазо-импульсной модуляции и в таком виде передается на приемник, который после детектирования этого сигнала выдает изменяющие ширину импульсы, идущие на дешифратор, который выделяет каждый импульс и передает его на соответствующий исполнительный механизм.
Метод выработки сигнала информации в системе изменения ширины импульса иногда называют преобразованием аналоговых величин в цифровые. Это преобразование происходит в передатчике, где потенциометр, связанный с ручкой управления, подает постоянное напряжение, продолжительность которого изменяет ширину стандартных импульсов.
Такой же процесс происходит в усилителе исполнительного механизма. Потенциометр обратной связи подает постоянное напряжение со значением, пропорциональным положению рычага толкателя руля в данный момент, а тот, в свою очередь, изменяет ширину стандартных импульсов. Импульс, выработанный в исполнительном механизме, затем сравнивается с импульсом, поступающим от дешифратора приемника для получения сигнала ошибки. Тут сигнал ошибки является тоже импульсом, хотя и значительно более узким, чем информационные импульсы или сравнительные импульсы, определяющие положения руля. Этот импульс полностью исчезает в момент совпадения информационных импульсов со сравнительными импульсами положения руля.
Шифратор в передатчике и дешифратор в приемнике используют триггерные схемы и генераторы импульсов, принадлежащие к классическим элементам техники цифровых машин. Именно это обосновывает в некоторой степени право именовать описываемую систему пропорционального управления цифровой системой, хотя может быть более правильным было бы наименование «система дискретной передачи значений управляющих параметров» (в отличие от непрерывной передачи в аналоговой системе). Движения ручки управления в передатчике, преобразованные в электрические сигналы, дают в аналоговой системе эпюру непрерывной кривой (см. рис. 7.14 а), а в цифровой системе — ступенчатой кривой (см. рис. 7.14 б). Однако поскольку интервалы времени в цифровой системе малы, то обе кривые практически равнозначны.
Теперь укажем на несколько деталей. Как мы уже знаем, определенные длительности включений (интервалы времени) отдельных каналов или операций управления в пределах одного счетного цикла (цикла передачи) зависят от триггерных счетчиков в передатчике и приемнике. Если частота оборота счетчика равна, например, 50 Гц, то один оборот длится 20 мс. Эти 20 мс могут быть разделены на одинаковые отрезки времени и одну более длинную паузу.
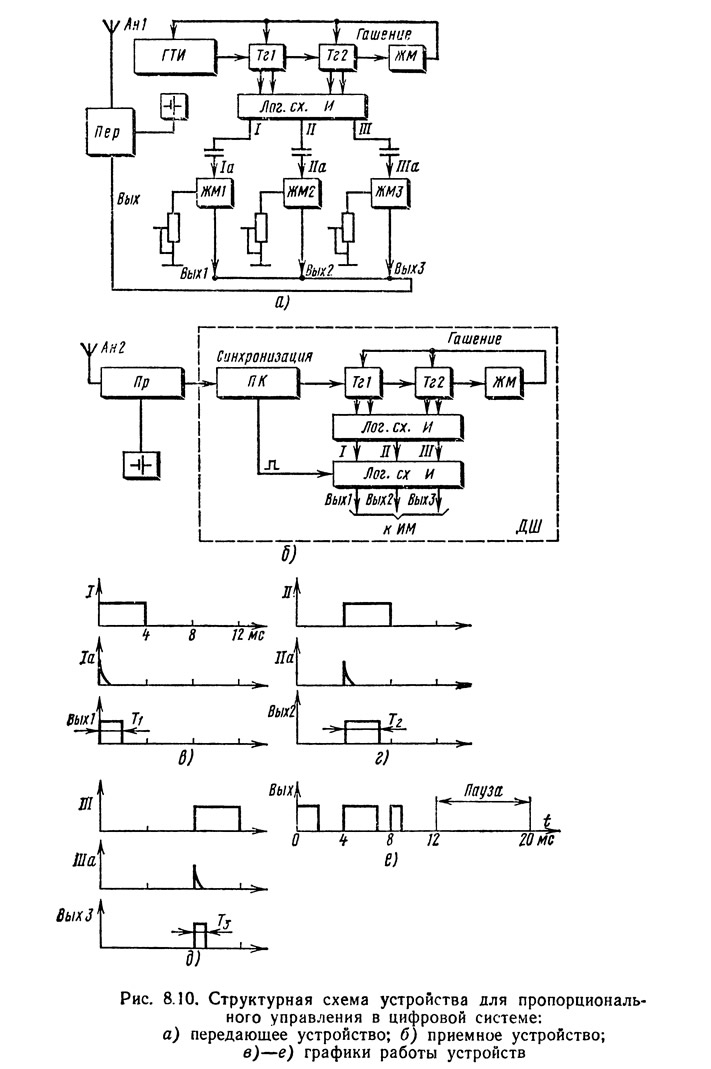
Допустим, что мы хотим пропорционально и одновременно управлять тремя рулями в модели. Тогда мы разделим эти 20 мс на три отрезка по 4 мс и одну синхронизирующую паузу в 8 мс. Теперь на каждую операцию управления приходится время в 4 мс, в течение которого может быть передан прямоугольный управляющий импульс, ширина которого переменна в пределах от нуля до 4 мс (рис. 8.10 г). Управляющий импульс начинается в начале включения соответствующего интервала времени канала (0, 4, 8 мс), и в течение его действия на модель передается информация о требуемом положении данного руля. Если ширина управляющего импульса равна 2 мс (половина максимального интервала времени канала, т. е. 4 мс), то это значит, что руль находится в нейтрали (канал I—Т1 на рис. 8.10 в). Более широкий или более узкий управляющий импульс вызовет соответствующее отклонение руля (канал II—Т2 и III—T3 на рис. 8.10 г, д).
Шифраторы
На рис. 8.10 а мы видим структурную схему шифратора в передатчиках дистанционного управления с цифровой системой. Генератор тактовых импульсов (нестабильный мультивибратор или же LC-генератор) управляет триггерами Тг1 и Тг2 (счетчиком). Частота генератора тактовых импульсов определяет продолжительность включения отдельных каналов (4 мс на рис. 8.10 в, г), т. е. каждый канал имеет определенный интервал времени в цикле передачи.
Когда счетчик пройдет все положения, а в этом примере их только два — Тг1 и Тг2, то его последнее положение приведет в действие ждущий мультивибратор ЖМ, который включится на время синхронизирующей паузы (8 мс на рис. 8.10 е) и заблокирует генератор тактовых импульсов. После окончания паузы ждущий мультивибратор возвратится в исходное положение и разблокирует генератор тактовых импульсов, который снова будет управлять счетчиком при следующем цикле. Таким образом, период возникновения тактовых импульсов равен циклу оборота (передачи). Диодный элемент логической функции И производит выбор отдельных интервалов времени каналов (I—III на рис. 8.10 а) от триггеров Тг1 и тг2. Выходы I—III поочередно пропускают сигнал (рис. 8.10 в—д — верхний ряд).
Передний фронт выходного импульса I—III теперь дифференцируется небольшим конденсатором Ia—IIIa (см. рис. 8.10 в—д — средний ряд) и затем запускает ждущий мультивибратор соответствующего канала (ЖМ1—ЖМ3 на рис. 8.10 а). Длительность импульсов, вырабатываемых этими мультивибраторами (Т1—T8), может регулироваться извне с помощью потенциометра, непосредственно связанного с соответствующей ручкой управления передатчика. Отклонения ручки управления вызывают посылки импульсов с разной длительностью Т1—Т3 (см. рис. 8.10 в—д — нижний ряд). Управляющие канальные импульсы и синхронизирующие импульсы затем группируются (суммируются) и образуют импульсную последовательность (см. рис. 8.10 е), которая модулирует несущую ВЧ передатчика.
Дешифраторы
Импульсная последовательность от передатчика может быть преобразована в приемнике так, что отдельные управляющие канальные импульсы будут поступать параллельно (одновременно) на соответствующие соединительные механизмы.
Структурная схема приемника для пропорционального управления моделью в цифровой системе приведена на рис. 8.10 б.
Однако поскольку сигналы управления подвергаются искажениям по пути от передатчика до приемника, то за каскадом ВЧ здесь имеется элемент, формирующий импульсы. Именно с выхода этого элемента получается соответствующая последовательность импульсов (сигнал управления) (см. рис. 8.10 е). Передние фронты канальных импульсов управляют счетчиком (триггерами Тг1 и Тг2), а ждущий мультивибратор ЖМ обеспечивает автоматический возврат счетчика в исходное положение при синхронизирующей паузе.
Диодный элемент логической функции И (1) формирует сигнал так, как это описано выше (см. рис. 8.10 в—д — верхний ряд), а на выходах I—III поочередно появляется сигнал.
Таким образом, мы получим в определенные интервалы времени на выходах каналов импульсы с изменяющейся шириной. Эта ширина пропорциональна положению ручки управления в передатчике в данный момент. Теперь шифрование и передача сигналов операций пропорционального управления и преобразование их в параллельные сигналы уже выполнены. Остается преобразовать ширину импульсов в пропорциональные отклонения руля, для чего как раз и служат исполнительные механизмы — одна из самых важных частей системы пропорционального управления (см. гл. 10).
Структурная схема типового устройства пропорционального управления показана на рис. 8.11.
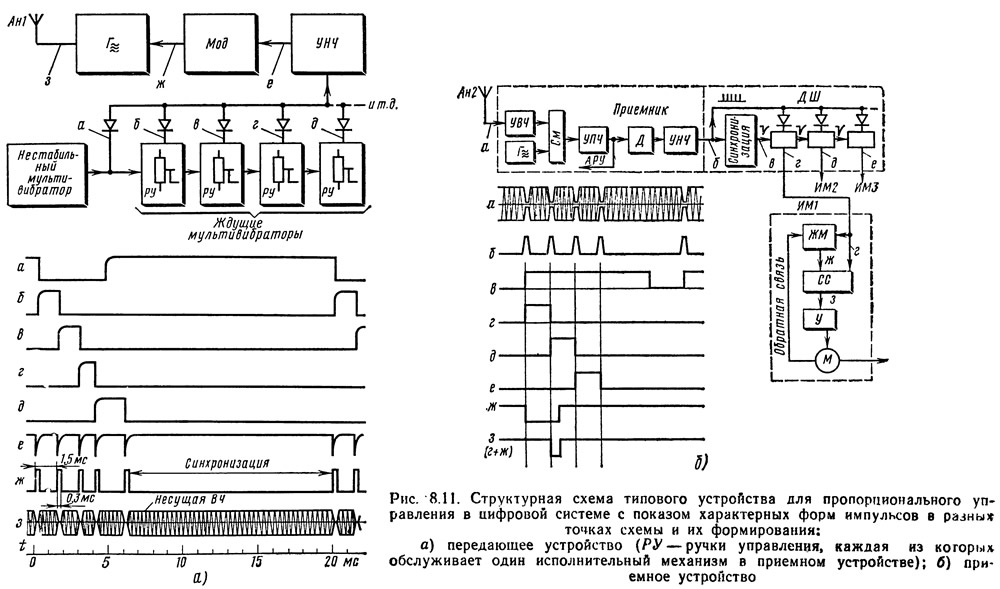
Достоинством системы последовательного (поочередного) переключения сигналов является также то, что элементы схемы всех каналов одинаковы, что облегчает регулирование. Зато недостатком является то обстоятельство, что повреждение одного из мультивибраторов прерывает работу всех остальных каналов устройства. Этого дефекта нет при параллельном (одновременном) переключении каналов, но зато тогда больше возможность искажений, вносимых в отдельные каналы мультивибраторами электронного переключателя, которые должны иметь различные параметры. Импульсы, вырабатываемые этими мультивибраторами, должны иметь различные длительности, чем больше длительность импульса, тем больше искажения, вносимые мультивибратором в сигнал, передаваемый для данного канала.