
Сравнение истории развития техники радиоуправления моделями с историей развития общей радиотелемеханики позволяет заключить, что изучение радиоуправляемых моделей полезно, стимулирует научные исследования и технический прогресс, не говоря уже о спортивных, воспитательных и политехнических проблемах радиомоделирования.
Развитие дистанционного управления моделями было связано с внедрением новых технических средств и прошло большой путь от искровых передатчиков и приемников с когерерами до современных устройств с полупроводниковыми и интегральными схемами.
Подлинное развитие дистанционного управления моделями началось лишь после второй мировой войны. В 1948 г. в США впервые было организовано серийное производство надежной ламповой аппаратуры для радиоуправления моделей. Это была одноканальная аппаратура конструкции братьев Гуд (Good). Двухламповый передатчик, собранный по двухтактной схеме, работающей с излучением типа А1 в диапазоне 54 МГц, стал классическим решением. Одноламповый сверхрегенеративный приемник повторялся в разных вариантах моделистами (а также заводами) до 1962 г.
В 1946 г. появилась одноканальная аппаратура, работающая с излучением типа А1, оснащенная сверхрегенеративными приемниками с газоразрядными электровакуумными приборами — миниатюрными тиратронами RK61 и RK62. Аппаратура этого типа была сравнительно надежной, хотя срок службы газоразрядного электровакуумного прибора не превышал одного-двух часов. Позднее небольшие предприятия стали выпускать такую аппаратуру в США, Англии и Франции, она также изготовлялась радиолюбителями в одно- и двухламповых вариантах. В 1950—1957 гг. типовой лампой для таких устройств был субминиатюрный европейский тиратрон XFG1.
Период 1954—1957 гг.— это период попыток увеличения надежности работы одноканальной аппаратуры путем применения излучения типа А2. Как правило, это были двухламповые приемники, часто с преобразователями напряжения.
Первые опыты по применению транзисторов относятся к 1954—1956 гг. Сначала это были усилители постоянного тока для релейного каскада одноканальных ламповых приемников. По мере распространения полупроводников начали применять лампово-транзисторные приемники, в которых в качестве сверхрегенеративных детекторов работали субминиатюрные вакуумные лампы, а в УНЧ и релейных каскадах использовали транзисторы. Такой тип одно- и многоканального приемника промышленность выпускала серийно, а моделисты строили сами вплоть до 1967 г. Передатчики все еще оставались ламповыми.
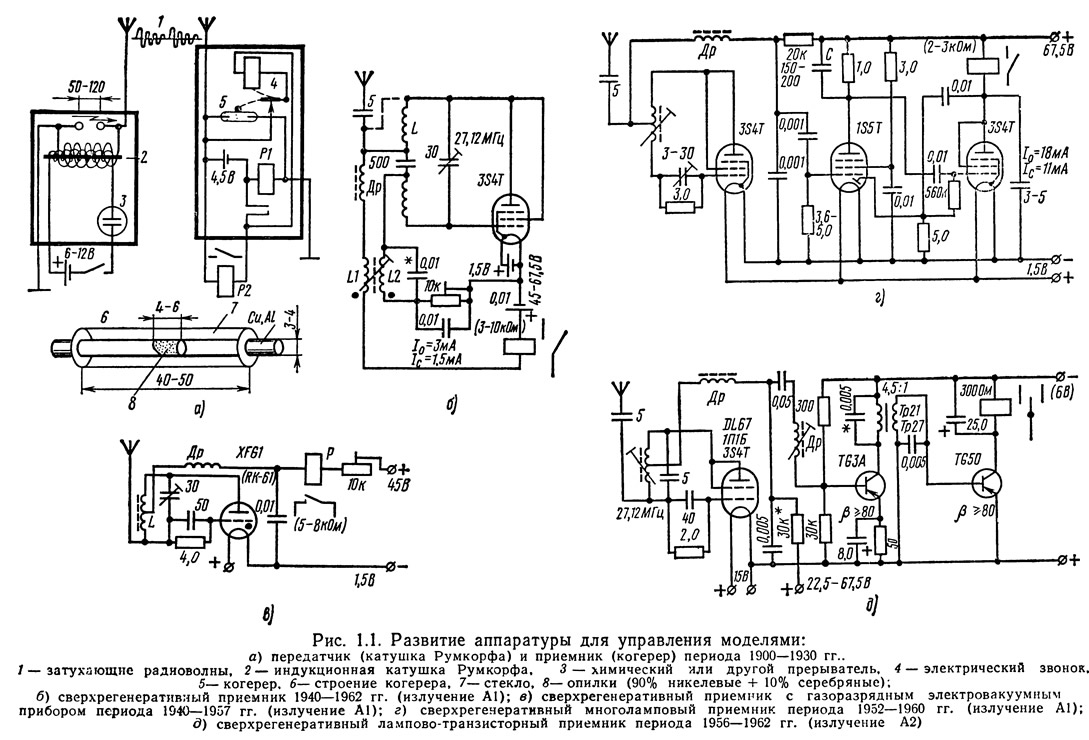
Тут надо добавить, что интенсивное развитие многоканально» аппаратуры началось с работ американца Роквуда (Rockwood) в 1951 г., а в Европе — с 1954 г., с работ англичанина Хоннест-Редлиха (Honnest-Redlick). Это были ламповые приемники с вибрационными (язычковыми) резонансными реле и ламповые передатчики с блокинг-генераторами НЧ (рис. 1.1). Этот тип ламповой аппаратуры сохранялся в серийном производстве до 1957 г., а в любительских конструкциях — до 1963 г. Вариантом этого типа были лампово-транзисторные приемники, а затем полностью транзисторные приемники, но все еще с язычковыми резонансными реле. Чем это объяснялось?
После внедрения транзисторов в технику дистанционного управления моделями сначала разрабатывали такие схемы, в которых было бы как можно меньше этих элементов. Тогда они стоили очень дорого, причем часто были несовершенными. Поэтому сохраняли язычковые резонансные реле, благодаря которым можно было использовать транзисторы в УНЧ. В этом случае один выходной транзистор обслуживал от четырех до десяти каналов. Позднее появились транзисторы и во входных каскадах сверхре-генеративных приемников, но в течение долгого периода их применяли для этого неохотно, предпочитая субминиатюрные лампы.
В 1958 г. в США стали применять в более широком масштабе полностью транзисторные супергетеродинные приемники с язычковыми резонансными реле. Число каналов возросло до десяти — двенадцати с возможностью посылки двух,'реже трех команд одновременно. Начали заменять промежуточные реле (реле на выходе дешифратора приемника) транзисторами, что еще больше повысило надежность работы устройств (отсутствие контактов, стойкость к механическим вибрациям и т. п.).
В Европе развитие дистанционного управления моделями протекало иначе. Тут первую серийную одноканальную аппаратуру, работающую с излучением А1 и с одноламповым приемником, начали выпускать в 1949 г. С 1950 г. началось производство ламповой одноканальной аппаратуры, а с 1954 г.— многоканальной с язычковыми резонансными реле.
В 1960 г. в Европе начали производство схем с электрическими фильтрами, в которых каждый канал НЧ имел отдельный выходной транзистор. Когда транзисторы стали дешевле, решено было заменить ими и электромеханические реле. Таким образом, в бесконтактных реле с электрическими фильтрами стали применять уже по два-три транзистора на каждый канал НЧ, а сам приемник содержал еще по четыре-восемь транзисторов. Устройства с электрическими фильтрами нашли самое широкое распространение.
Когда появилась возможность использовать в каждом канале по пять — десять транзисторов, диодов и других полупроводниковых приборов, начали думать о системах пропорционального управления — аналоговых и цифровых. Впервые такие системы стали производить в США в 1960 г., а с 1963 г. их стали выпускать в широких масштабах. Конечно, серийное производство такой сложной аппаратуры — это дело промышленных предприятий. В 1964—1965 гг. появились первые устройства этого типа и в Европе (Великобритании и ФРГ), а с 1965 г. — в Японии.
Аппаратура для пропорционального управления в аналоговой и цифровой системе содержит только в приемных схемах по 30—50 транзисторов и других полупроводниковых приборов. Возникает вопрос: почему число транзисторов столь велико, когда раньше их было значительно меньше. Ответ прост: если для каждого канала использовать большее число полупроводниковых приборов, то можно внедрять двухпозиционные элементы, в которых каждый транзистор будет работать только в двух состояниях (включено — выключено). Благодаря этому возрастает стабильность и надежность работы всей аппаратуры.
В передатчиках радиолампы дольше всего не хотели уступать дорогу транзисторам. Первые серийные транзисторные передатчики появились в Европе (в ФРГ в 1960 г.), позднее в США (в 1961 г.). Однако лампы в передатчиках, особенно в каскадах усилителей мощности ВЧ, встречались еще в 1968 г. даже в приборах заводского изготовления. Американские передатчики отличались большей мощностью излучения, чем передатчики европейского производства. Большое влияние на увеличение надежности работы низкочастотных устройств в передатчиках оказало применение высокодобротных ферромагнитных материалов.
Существенно изменились также исполнительные механизмы: от обычных электромагнитов через звездообразные распределители («звездочки») с резиновым приводом до современных исполнительных механизмов.
Среди источников электропитания аппаратуры радиоуправления теперь доминируют миниатюрные кадмиево-никелевые аккумуляторы.
Кратко характеризуя развитие техники дистанционного управления моделями в мире за период 1945—1973 гг., можно констатировать, что в США совершенствуется многоканальная аппаратура, работающая с язычковыми резонансными реле, тогда как в Европе большой упор был сделан на развитие аппаратуры с электрическими фильтрами. Примерно до 1960 г. легкость сбыта на обширном европейском рынке простой аппаратуры радиоуправления не заставляла заводы-изготовители разрабатывать более сложные системы пропорционального управления. Совершенно другое положение сложилось на американском рынке, в результате чего уже с 1964 г. началось массовое внедрение аппаратуры для пропорционального управления. В Европе это произошло лишь в середине 1966 г.
Еще десять или пятнадцать лет назад аппаратура для пропорционального управления могла быть только ламповой. Она была громоздкой и тяжелой. В 1964 г. ее попробовали реализовать на транзисторах и германиевых диодах. В то время эта аппаратура также получилась слишком тяжелой и дорогой, для нее были необходимы многие дополнительные элементы, обеспечивающие стабильность и надежность. Теперь аппаратура, в которой используются главным образом полупроводниковые кремниевые элементы, стала дешевле и надежней. Помимо классических кремниевых элементов, используются также тиристоры, а с 1968 г.— интегральные схемы. Они обладают большей надежностью, чем схемы на классических элементах, и притом весьма миниатюрные.
В 1967 г. становится популярной простая одноканальная аппаратура, обслуживающая пропорционально один или два руля в модели, а также приводной двигатель. Эта аппаратура известна под названием системы ГГ («Galloping Ghost»). Рули в модели непрерывно вибрируют под влиянием импульсов передатчика. Эта аппаратура использовалась со специальными исполнительными механизмами. С 1970 г. система ГГ все более вытесняется простой аппаратурой для пропорционального управления с одним исполнительным механизмом или же с регулятором оборотов двигателя в модели.
С 1968 г. в Европе наметился возврат к дешевой обычной одно-и двухканальной аппаратуре с электрическими фильтрами. Эта тенденция сохранилась и до настоящего времени.
Другой довольно характерной чертой последних лет развития дистанционного управления моделями является появление все большего числа комплектов деталей различных приборов, входящих в систему пропорционального управления для самостоятельной сборки.