
Электронные тормозные схемы
Для пропорционального торможения колес шасси летающих радиомоделей можно использовать вместо дорогих исполнительных механизмов простые усилители, взаимодействующие с типовыми электромагнитными тормозами. Схема такого устройства приведена на рис. 10.31. Максимальный ток торможения равен 0,5 А, а выходной транзистор должен иметь небольшой радиатор.
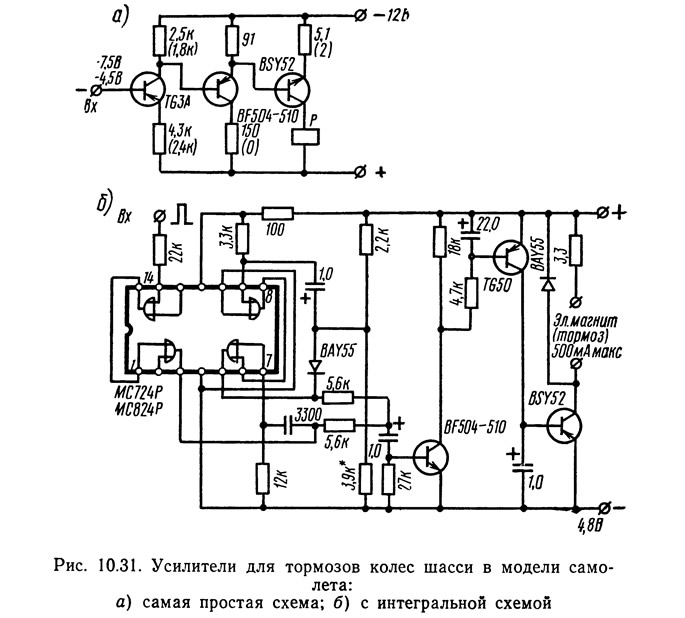
В случае питания приемника напряжением 4,8 В следует несколько изменить величины сопротивлений резисторов (данные, приведенные на рис. 10.31 в скобках).
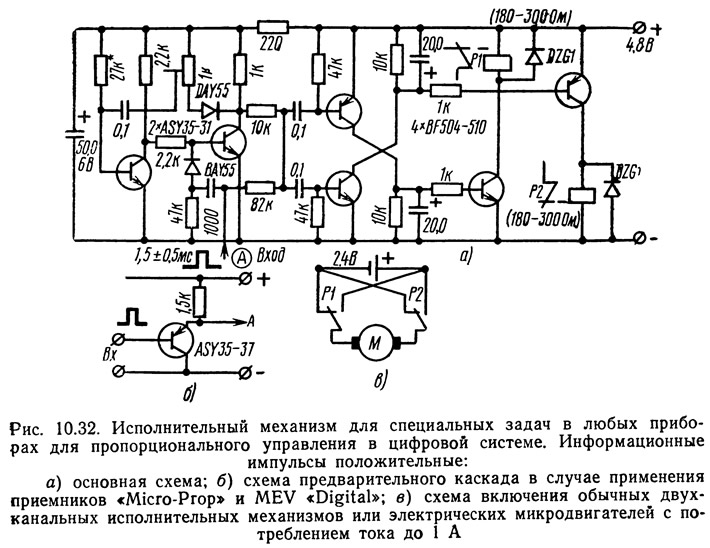
Электронные исполнительные механизмы
Схемы специальных усилителей для тормозов и подъемников шасси и механизмов привода закрылков и т. п. приведены на рис. 10.32. Питание вместе с приемником — 4,8 В (без использования отвода от середины батареи).
Пропорциональное управление электрическими приводными двигателями
В цифровой аппаратуре часто возникает необходимость пропорционального управления скоростью движения небольших гусеничных или плавающих моделей. Рисунок 10.33 иллюстрирует возможность подсоединения электрического двигателя к зажимам канального модуля аппаратуры «Varioprop» (цветовые и цифровые обозначения относятся к проводам и штекерам этой аппаратуры).
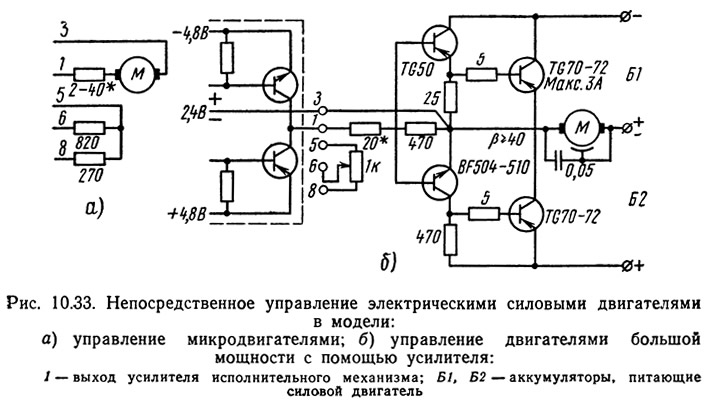
Управление осуществляется путем отклонения ручки управления в передатчике в обе стороны. Эти отклонения регулируют направление вращения, скорость вращения и выключение приводных двигателей в модели (например, гусеничной). Однако следует заметить, что данная схема дает хорошие результаты только с небольшими электродвигателями, мощность которых согласована с мощностью выходных транзисторов усилителей механизмов.
В этом случае надо отпаять оба провода от микродвигателя исполнительного механизма и через штепсельные гнезда подвести их к приводному двигателю модели. Третий провод, соединенный с корпусом микродвигателя, остается. Оба приводных двигателя модели должны иметь искрогасящие схемы: дроссели (50 витков провода ПЭВ 0,5 мм на ферритовом сердечнике) во всех проводах, соединяющих двигатели и конденсаторы 0,01 мкФ, шунтирующие щетки, из которых одна должна быть соединена с металлическим корпусом двигателя.
Взаимодействие обычных исполнительных механизмов с аппаратурой для пропорционального управления в цифровой системе. Обычные исполнительные механизмы с электрическими микродвигателями например, «Servoautomatic-II», могут без какой-либо переделки совместно работать с аппаратурой для пропорционального управления в цифровой системе. Достаточно соответственно приспособить соединительный штекер механизма. Как это сделать, показано на рис. 10.32 в.
Приспособленный таким образом исполнительный механизм работает нормально при крайних отклонениях ручки управления в передатчике, сохраняя приближенную пропорциональность движений при промежуточных отклонениях. Он может быть использован, например, для обслуживания закрылков или шасси в летающих моделях и для регулирования скорости, изменения направления движения и для вспомогательных операций в колесных и плавающих моделях.
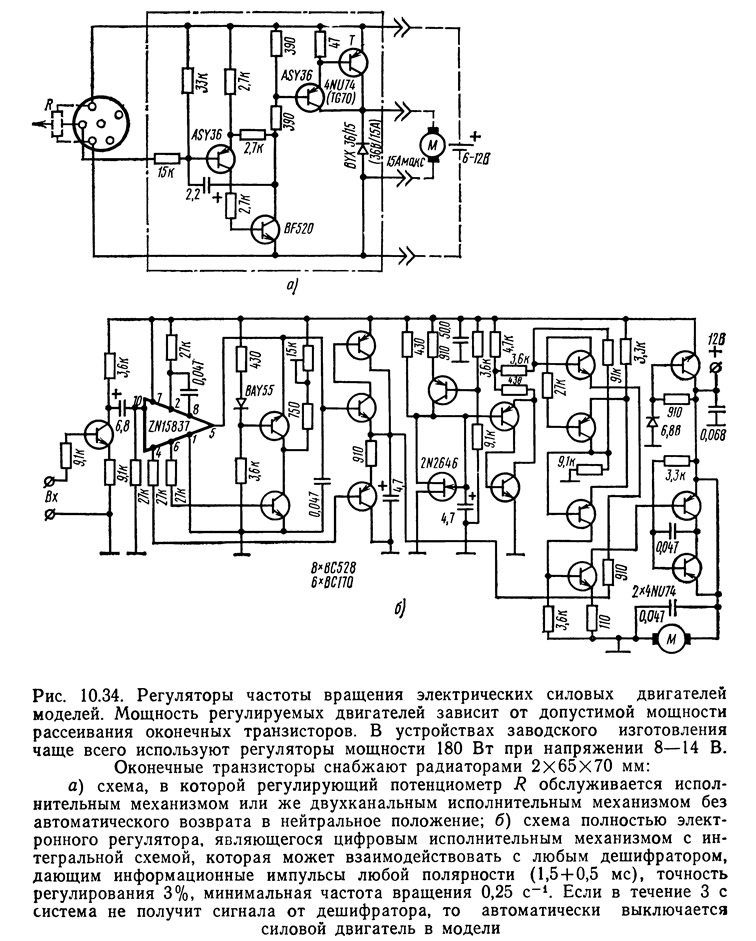
Для управления силовыми электродвигателями моделей применяют специальные схемы мощных регуляторов частоты вращения электродвигателей. Схема, показанная на рис. 10.34, обеспечивает управление электродвигателем мощностью до 180 Вт.