
Пропорциональные исполнительные механизмы работают примерно в 1,5—2 раза быстрее, чем обычные исполнительные механизмы. Теоретически идеальным представляется исполнительный механизм цифровой системы. Однако на практике механическая система привода рулей вносит погрешность около 1—5% в точность управления. Несмотря на это, качество работы пропорционального исполнительного механизма всегда лучше, чем у обычных исполнительных механизмов дискретного действия.
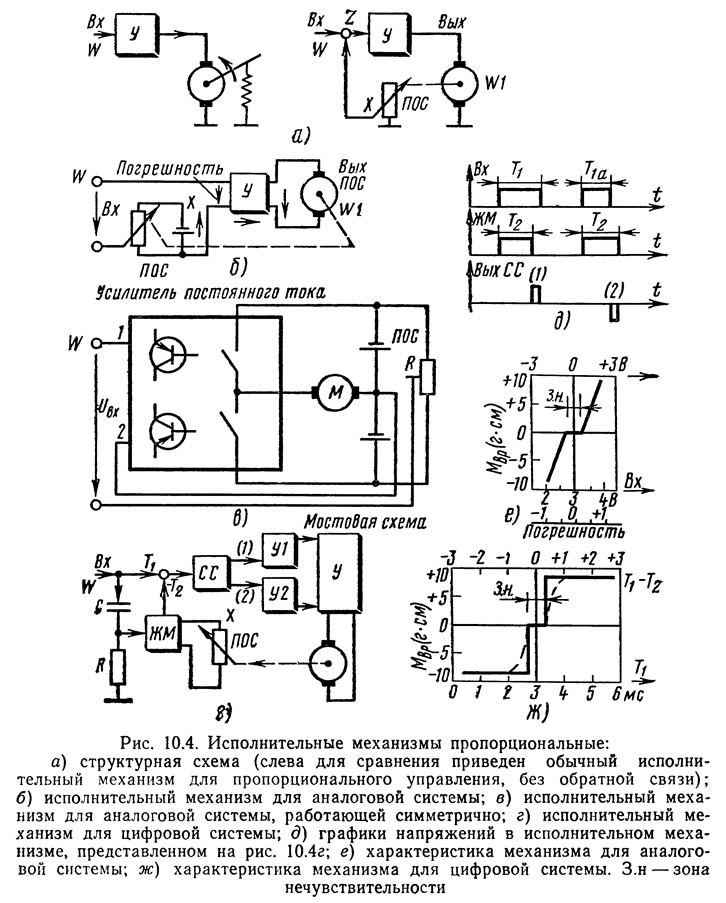
Структурная схема исполнительного механизма показана на рис. 10.4 а. Входной сигнал (в виде плавноменяющегося напряжения или импульсов) непрерывно складывается с выходной величиной, тоже получаемой в виде изменяющегося напряжения или импульсов. При равенстве этих сигналов их сумма равна нулю и исполнительный механизм находится в фиксированном положении. Если же между входным и выходными сигналами имеется разница, то в точке суммирования сигналов рассогласования Z — положительный или отрицательный сигнал. В зависимости от этого двигатель исполнительного механизма начнет работать в том или другом направлении, соответственно перемещая руль. Это будет происходить до того момента, пока сумма сигналов и, следовательно, напряжение на двигателе W1 снова не будут равны нулю.
Исполнительный механизм потребляет ток только во время его работы. С момента, когда достигается заданное положение, пропорциональное отклонению ручки управления в передатчике, механизм перестает потреблять ток и вся система остается в покое. Благодаря этому упрощается привод исполнительного механизма.
Однако надо помнить, что идеальная пропорциональная зависимость между выходной величиной и отклонением руля существует только теоретически. На практике эта зависимость изменяется из-за побочных факторов, действующих на систему регулирования. Кроме того, микроэлектродвигатель может при определенном установочном напряжении развивать только определенный вращающий момент. Если момент, действующий извне (например, аэродинамическая сила на руле), окажется большим вращающего момента микродвигателя, то изменится отклонение руля. С этим явлением борются, применяя, например, большие передаточные отношения в зубчатых передачах.
Управляющие сигналы W не обязательно должны быть в виде постоянных напряжений. Пропорциональные исполнительные механизмы могут управляться также импульсами, переменными во времени, и даже вообще обходиться без электрических величин (пневматические системы). В радиомодельной технике встречаются два вида исполнительных механизмов, а именно исполнительные механизмы для аналоговых систем, работающие с обратной связью по постоянному току, и механизмы для цифровых систем, использующие элементы логических функций и обратные связи, управляемые электрическими импульсами.
Структурная схема (пропорциональные исполнительные механизмы для аналоговых систем) приведена на рис. 10.4 б. Источником сравнительного напряжения может быть батарея приемника. В этом механизме входное (управляющее) напряжение является аналоговой величиной для отклонения ручки управления в передатчике, а сравнительное напряжение — электрическим аналогом полученного отклонения руля. Далее, погрешность регулирования и связанная с ней установочная величина W1 являются аналогом разницы между установкой ручек управления в передатчике и полученным отклонением руля в модели.
Усилитель исполнительного механизма для аналоговой системы представляет собой усилитель постоянного тока на транзисторах. Существуют различные схемы такого усилителя (см. рис. 10.10). Чаще всего он управляется сигналом постоянного тока W, приходящим от дешифратора приемника. Это напряжение получается путем выпрямления модулирующей частоты, выделенной в LC-фильтре. Аналоговые исполнительные механизмы часто встречаются во многих цифровых системах пропорционального управления. Дело в том, что если дешифратор цифровой аппаратуры дает последовательность сигналов с переменной шириной импульсов и постоянной междуимпульсной паузой (см. рис. 8.10 в, е), то удается путем использования простого сглаживающего /?С-фильтра получить постоянное напряжение. Величина этого напряжения будет пропорциональна ширине импульса, а следовательно, положению ручки управления в передатчике. Полученное постоянное напряжение может быть без трудностей использовано для управления исполнительным механизмом, предусмотренного, в принципе, для аналоговой системы.
Аналоговые исполнительные механизмы требуют применения стабилизированных источников питания и очень низкого сопротивления проводов, соединяющих батарею с механизмом. Дело в том, что любое падение напряжения на зажимах источника питания и в проводах может быть воспринято усилителем исполнительного механизма в качестве сигнала. Это приводит к взаимным помехам нескольких исполнительных механизмов, а в некоторых случаях — к колебаниям механической системы.
Наилучшим выходом в таком положении является применение двух отдельных батарей, соединенных друг с другом только в точках центрального отвода. Одна батарея питает элемент электронной информации (Т1—Т3 на рис. 10.27), а вторая — только транзисторы (Т4—Т7), управляющие микродвигателем. Другое решение — это использование кадмиево-никелевых аккумуляторов большой емкости. Для аппаратов с четырьмя исполнительными механизмами необходима емкость в 1—1,2 А·ч, для аппаратов с двумя исполнительными механизмами достаточна емкость в 500—750 мА·ч. Третье решение заключается в удалении всех излишних разъемов, выключателей и т. п. из схемы и применении соединительных проводов диаметром 0,6 мм или больше. Очевидно, что тут необходим источник питания с большой емкостью.
Пропорциональные исполнительные механизмы для цифровых систем являются также исполнительными механизмами с обратной связью. Импульсы, исходящие из дешифратора цифровой аппаратуры, не преобразовываются в постоянное напряжение, а являются непосредственно входной величиной W, управляющей механизмом (см. рис. 10.4 а). Входная величина — это прямоугольные импульсы, следующие с определенной частотой повторения, причем ширина импульса пропорциональна отклонениям ручки управления в передатчике.
Чтобы можно было сравнивать друг с другом входную величину W и сравниваемую величину X, последняя должна формироваться также из импульсов переменной ширины (так как исполнительный механизм теперь сравнивает не амплитуды напряжений, а длительность импульсов). Поэтому напряжения W и X имеют равные амплитуды.
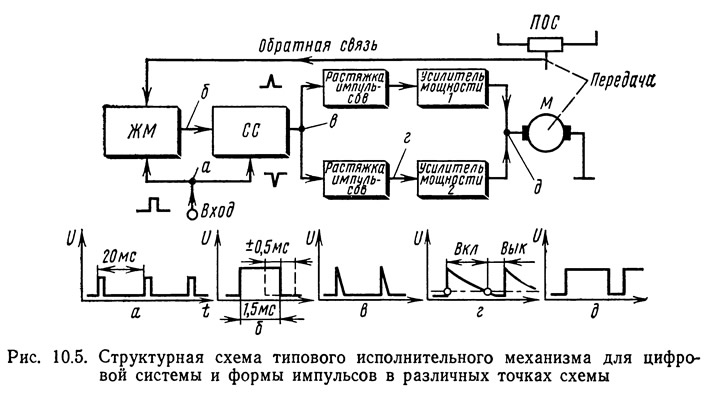
На рис. 10.4 г представлена структурная схема исполнительного механизма для цифровой системы, а на рис. 10.4 д — графики напряжений для одного из импульсов, выделенного из непрерывной последовательности импульсов входного сигнала W. Ширина его — это время Т1. Передний фронт этого импульса управляет через дифференцирующий элемент ждущим мультивибратором ЖМ, который в момент Т2 пошлет отрицательный выходной импульс. Время Т2 не зависит от ширины управляющего импульса, но поддается регулированию потенциометром R1. Если Т1 длится больше, чем Т2, то в точке суммирования обоих импульсных напряжений возникнет положительный импульс (в момент, обусловленный спадами импульсов Т2 и Т1). Если же входной импульс W уже (Т1), чем импульс ЖМ (Т2), то получим отрицательный разностный импульс. Если входной импульс и импульс ЖМ имеют одинаковую ширину, то разностного импульса не будет.
Напомним, что в исполнительных механизмах для аналоговых систем уравновешивание схемы происходило путем выравнивания напряжений, а в цифровых исполнительных механизмах уравновешивание достигается в результате выравнивания длительностей импульсов (их ширины). Ясно, что импульсы, управляющие исполнительными механизмами для цифровой системы, не обязательно должны быть предварительно сглажены и преобразованы в напряжение постоянного тока, как того требуют механизмы аналоговой системы.
Разностные импульсы проходят через схему, которая направляется в зависимости от полярности их к тому или иному выходу (1 и 2 на рис. 10.4 г). Эта схема может быть выполнена, например, из элементов логических функций — транзисторного НЕ и диодного И. Часто используют для этого специальный трансформатор, который упрощает разделение положительных и отрицательных импульсов.
Разностные импульсы, выделенные схемой, попадают на два одинаковых элемента — У1, У2, где они растягиваются. Затем они направляются на тот или другой вход мостовой схемы, служащей переключателем направления вращения микродвигателя исполнительного механизма (такая же мостовая схема имеется в исполнительных механизмах аналоговых систем).
Поскольку в механизмах цифровых систем длительность импульса ЖМ пропорциональна отклонению руля, а длительность входного импульса W пропорциональна положению ручки управления в передатчике, то получается пропорциональная зависимость между движениями ручки управления и отклонениями руля. При точном рассмотрении оказывается, что этот тип механизмов тоже является аналоговым, так как длительность импульса — это электрический аналог отклонения руля, а длительность импульса W — электрический аналог положения ручки управления. Таким образом, можно всю аппаратуру цифровой системы назвать аналоговой, поскольку передача ширины импульсов, междуимпульсной паузы и т. д. — это аналоги движений ручки управления в передатчике. Поэтому часто трудно отличить аналоговую радио-модельную аппаратуру от цифровой.
В отличие от так называемых чистых аналоговых систем, здесь используются в качестве аналогов не напряжение и частота, а временные параметры. На рис. 10.5 представлены схема механизма и графики его работы.
В радиомодельных устройствах пропорционального управления обязательным является то, что для передачи рулям движений ручки управления надо использовать аналоговые электрические величины, все равно какие — постоянное напряжение, звуковую частоту или ширину импульса. Исключением являются чистые цифровые системы, работающие с кодо-импульсной модуляцией, в которых используется кодовый шифратор для сравнительной информации об отклонениях руля в исполнительном механизме.
Какими же преимуществами обладают исполнительные механизмы цифровых систем?
Прежде всего тем, что уже при небольших отклонениях от положения покоя такой механизм развивает полную управляющую силу и сохраняет ее неизменной независимо от расстояния отклонения руля от точки балансировки (за исключением довольно узкой полосы нечувствительности). Поэтому точность работы механизма совершенно не зависит от действия на руль внешних факторов, например аэродинамического напора.
Всегда в нашем распоряжении имеется полная мощность исполнительного механизма и сохраняется пропорциональность между движениями ручки управления и отклонениями руля независимо от его нагрузки. Исполнительные механизмы аналоговых систем более чувствительны к нагрузке руля, хотя и они могут быть избавлены от этого недостатка при соответствующем конструктивном решении.
Некоторые радиомоделисты считают именно этот недостаток достоинством. Для начинающих радиомоделистов лучше подходят исполнительные механизмы цифровых систем, поскольку они действуют быстрее, а в случае необходимости можно при их использовании управлять даже по простой системе «Включено — Выключено».
Микроэлектродвигатели цифровых исполнительных механизмов управляются импульсами постоянного тока. Как это влияет на работу микродвигателя?
Каждый импульс вызывает короткий разгон микродвигателя и определенный пусковой вращающий момент. Поскольку эти импульсы очень кратковременны, то микродвигатель не вращается, а только постепенно поворачивается, что видно на рис. 10.6 а. Во время действия импульса ротор микродвигателя получает ускорение, после затухания импульса ротор тормозится магнитным полем постоянного магнита. Если импульсы очень коротки (около 1—2 мс), то ток, текущий через микродвигатель, будет очень небольшим, как и развиваемый вращающий момент ротора (слишком малым, чтобы преодолеть трение подшипников). Микродвигатель практически будет находиться в покое. При увеличении длительности (ширины) импульса тока вращающий момент быстро возрастет вплоть до предельного значения (рис. 10.6 б). Это произойдет тогда, когда ток ротора успеет возрасти до максимальных значений, обусловленных напряжением питания и активным сопротивлением обмотки ротора.
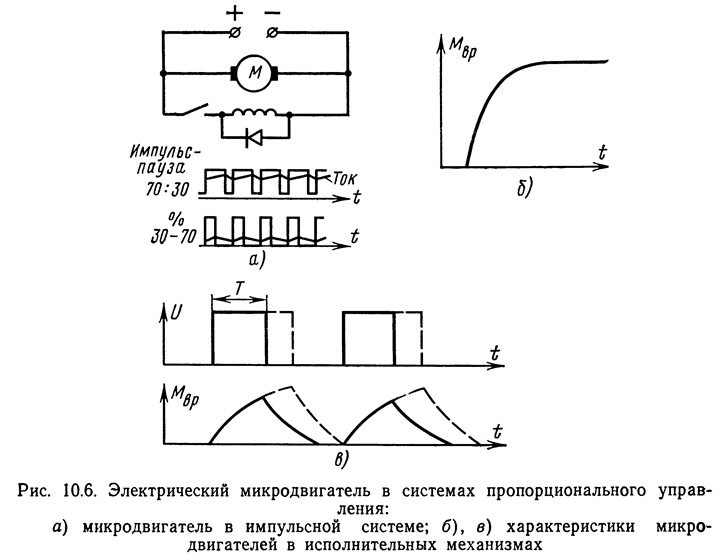
То, как это выглядит на практике в цифровом исполнительном механизме, показано на рис. 10.4 д. Каждый входной импульс получает от ЖМ сравнительный импульс постоянной ширины, например 3 мс. Если изменить продолжительность входного импульса, то получим процесс, отображенный на рис. 10.4 ж штриховой линией. Видно, что при слишком малой продолжительности разностных импульсов (T1—Т2) двигатель не начинает работать и, следовательно, не развивает вращающего момента. Таким образом, получается полоса нечувствительности Sn, подобная той, о которой говорили при описании механизмов для аналоговых систем. Однако при точно определенной продолжительности разностных импульсов значение момента вращения возрастает до предела (рис. 10.6 в). Этот факт объясняет наличие на схеме рис. 10.4 г элементов, растягивающих импульсы (У1, У2). Они удлиняют даже самые короткие разностные импульсы до значений, позволяющих развитие микродвигателем полного вращающего момента.
Если в «растягивающем» элементе работает, например, ЖМУ то микродвигатель будет управляться импульсами тока постоянной ширины независимо от продолжительности разностных импульсов. Ширина импульсов тока зависит от постоянной времени этого мультивибратора и ее следует подбирать для каждого микродвигателя. Тогда микродвигатель будет иметь характеристику, показанную сплошной линией на рис. 10.4 ж. Ясно, что этим же способом можно сузить полосу нечувствительности до нуля, но на практике это не применяется ввиду известных трудностей с подавлением нестабильности исполнительного механизма. Иногда применяют интегрирование разностного импульса с помощью LC-элемента, так что растягивающий однопозиционный мультивибратор не может запускаться меньше чем на определенный минимум времени (несколько циклов). Другой способ заключается в том, что разностные импульсы растягивают от очень малых до очень больших пропорционально их первоначальной ширине. Тогда характеристика будет ближе к показанной штриховой линией на рис. 10.4 ж, но с более крутым спадом за полосой нечувствительности. Для исполнительных механизмов цифровых систем также требуется некоторое уменьшение вращающего момента вблизи точки баланса схемы, чтобы предотвратить «выбег» («проскоки») механизма (перерегулирование).
Поскольку исполнительный механизм с электродвигателем представляет собой определенную массу, имеющую инерцию, то электромотор не может сразу же останавливаться в момент, когда напряжение в точке суммирования падает до нуля. Тогда происходят «выбеги», которые необходимо подавлять, чтобы не было долгих колебаний механизма около точки баланса сигнала, что отрицательно влияло бы на чувствительный микродвигатель и быстро бы изнашивало потенциометр обратной связи.
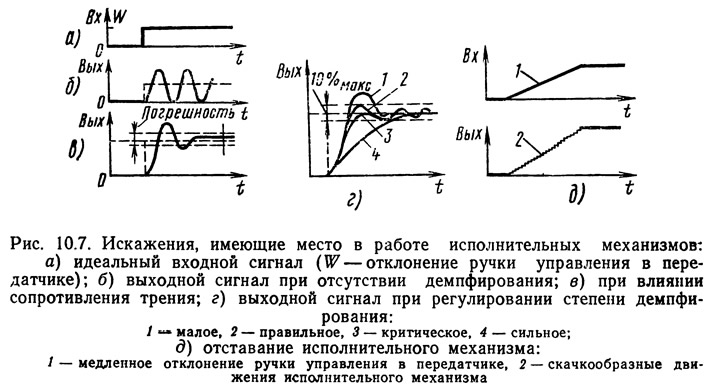
Зона нечувствительности исполнительного механизма (З.н) (рис. 10.4 е, ж) должна быть как можно меньшей. Однако надо сразу сказать, что некоторая небольшая полоса нечувствительности необходима, чтобы можно было останавливать руль без «выбегов». На практике хороший исполнительный механизм — это компромисс между шириной полосы нечувствительности и «выбегами» руля. Небольшие «выбеги» полезны, поскольку тогда механизм быстрее попадает в положение, при котором установочное напряжение равно нулю (рис. 10.7). Сужение полосы нечувствительности путем увеличения усиления схемы (сигнала ошибки) грозит появлением больших «выбегов».
На подавление (демпфирование) «выбегов» исполнительного механизма с обратной связью и микроэлектродвигателем влияют следующие факторы: передаточное отношение зубчатой передачи, вращающийся момент микроэлектродвигателя, момент инерции микродвигателя, число оборотов ротора и так называемый коэффициент относительного демпфирования. Как правило, величину этого коэффициента для радиомодельных исполнительных механизмов выбирают равной 0,7, хотя уже при 0,25 схема становится очень стабильной.
Наиболее подходящим является микроэлектродвигатель с малым моментом инерции ротора, такой микродвигатель имеет быстрый разгон и такую же остановку. Поэтому на практике применяют микродвигатели с минимальным напряжением срабатывания (около 0,1 В). Благодаря этому получаются малые «выбеги», подавления «выбегов» достигают также за счет трения в подшипниках, передачи и путем инверсии фазы в схеме усилителя. В этом случае следует заботиться о том, чтобы напряжение в точке суммирования было равно нулю, до того как микродвигатель достигнет нужной точки баланса. Тогда благодаря инерции он сам попадет «выбегом» в эту точку. Кроме упомянутой уже инверсии фазы (например, с помощью емкости), можно применять и обратную связь (резистивно-емкостную), напряжение которой зависит от скорости вращения микродвигателя исполнительного механизма.
На практике есть еще один вариант демпфирования «выбега» механизма, вызываемого инерцией микродвигателя. Дело в том, что в момент, когда оконечный каскад усилителя исполнительного механизма запирается, а микродвигатель вследствие его инерции продолжает еще вращаться, на выходе оконечного каскада появляется дополнительное напряжение, вызванное вращением микродвигателя в качестве генератора. Величина этого напряжения пропорциональна числу оборотов в данный момент, а его полярность обусловлена направлением вращения микродвигателя. Через высокоомный резистор (например, R на рис. 15.8) это напряжение снова подается на каскад однопозиционного мультивибратора, который влияет на микродвигатель, предотвращая его «выбег» в момент достижения нужной установки руля. Таким образом значительно возрастает стабильность работы исполнительного механизма.
Аналоговый исполнительный механизм имеет одно неприятное свойство: погрешность регулирования зависит от аэро- или гидродинамического давления на руль. Это можно частично устранить путем применения соответственно большей передачи, но тогда это отразится отрицательно на скорости действия механизма. Поэтому и тут приходится идти на компромисс. Полоса нечувствительности в механизмах для цифровых систем обычно несколько уже, чем в аналоговых системах.
Совершенно очевидно, что всегда могут быть небольшие погрешности регулирования, которые являются расхождением между входным и выходным сигналами. Такие погрешности не могут быть скомпенсированы возникающими в точке суммирования напряжениями, так как они слишком малы для микродвигателя. Если пользоваться усилителем с линейной характеристикой (типичным для аналоговых систем), то погрешность может зависеть от многих факторов. Это будут прежде всего трение и зазоры в подшипниках и передачах (так называемая полоса нечувствительности системы с нелинейной характеристикой). Тут играет некоторую роль и ток трогания микродвигателя (а он не всегда мал).
В зависимости от величины погрешности к двигателю подводится определенное напряжение, но работает он только тогда, когда его вращающий момент достаточно велик, чтобы преодолеть все механические сопротивления и передать движение на вал. Случается, что этого напряжения действительно достаточно для запуска микродвигателя, но при этом скорость его вращения настолько мала, что вал будет вращаться лишь до тех пор, пока он не достигнет положения, в котором трение затормозит микродвигатель. Однако это не будет тем положением, до которого должен был бы дойти механизм. Это — нежелательное явление, поскольку микродвигатель будет продолжать потреблять электроэнергию, что неэкономично, грозит перегревом и даже повреждением микродвигателя.
Из сказанного выше косвенно следует, что в зависимости от нагрузки руля погрешность может быть меньшей или большей, как и связанное с этим потребление тока заторможенным микродвигателем. Рассматриваемая погрешность регулирования незначительно влияет на качество управления, так как отклонения руля от правильного положения даже в несколько процентов мало заметны. Остается только один дефект — непрерывное потребление тока, но и этого достаточно, чтобы искать более совершенных решений.
Поэтому стали применять усилитель с трехпозиционной характеристикой, который не подает напряжение на микродвигатель тогда, когда напряжение в точке суммирования не достигает определенного минимального значения. Лишь тогда, когда этот порог преодолевается, усилитель подает полное напряжение на микродвигатель, благодаря чему микродвигатель может развивать максимальный вращающий момент и приводить систему в состояние равновесия. В такой схеме микродвигатель или полностью включен, или вообще не включен, а погрешность регулирования уже не зависит от трения в подшипниках и от нагрузки руля. Благодаря этому можно механизм устанавливать точно в соответствии с сигналом управления. В этой системе целесообразно применять микроэлектродвигатели с малыми моментами инерции, которые, как известно, имеют несколько большие пусковые токи.
Это невозможно в схемах с линейными (аналоговыми) усилителями, которые нуждаются в дорогих и точных микродвигателях с чашечным ротором и с малыми токами трогания и притом с небольшим моментом инерции (чтобы погрешность регулирования не выходила за допускаемые пределы).
Все электрические исполнительные механизмы с обратной связью имеют склонность к некоторым смещениям нулевого положения (нейтрали), т. е. к так называемому дрейфу нуля при изменениях температуры. Это зависит от свойств усилителей и электронных элементов, характеристики которых очень часто изменяются вместе с температурой. Дрейф нуля — это зависимость обратного тока коллектора Iк.бо в транзисторах и в меньшей степени напряжения Uэ.б от изменения температуры. С этим явлением борются путем стабилизации режима и компенсации нелинейными элементами (необходим тщательный подбор элементов), применения симметричных схем — двухтактных или мостовых, преобразования постоянного тока в переменный (это самое лучшее решение, но в технике радиомодельных исполнительных механизмов еще не применяется). Чаще всего применяется первое из упомянутых решений, но оно обходится дорого, трудоемко на стадии проектирования и не вполне эффективно. Даже современные цифровые исполнительные механизмы имеют в диапазоне изменений рабочей температуры от —15 до +60°С дрейф нуля около 2% при сохранении точности установки в 0,5%.
На первый взгляд может показаться, что если механизм несколько сместит свое нулевое положение (нейтраль), то это ничему не мешает, так как в аппаратуре для пропорционального управления такое смещение может быть компенсировано (триммерировано) с передатчика. В действительности же, если аппаратура отказывает и защитное устройство приводит исполнительные механизмы в нейтральное положение (которое в действительности уже вовсе не нейтральное), то случайные отклонения рулей могут вызвать неприятные последствия для модели.
Поскольку модели летают с большим диапазоном скоростей, то существует опасение, что при полетах с большими скоростями они могут стать неуправляемыми, если не учитывать принцип, что чем меньше скорость, тем необходимо большее отклонение руля или его площадь. О преимуществах сохранения неизменного коэффициента полезного действия рулей в любых режимах полета мы уже говорили. Не трудно было бы сделать зависимой степень отклонения руля от аэро- или гидродинамического напора на его поверхность с помощью введения этого значения в схему обратной связи исполнительного механизма. Однако практический опыт показывает, что в действительности в этом нет необходимости, по крайней мере на нынешнем этапе развития пилотажной техники. Добавим, что механизмы цифровых систем нечувствительны к давлению на руль, а отсюда возможны наклонности к перегрузке модели.
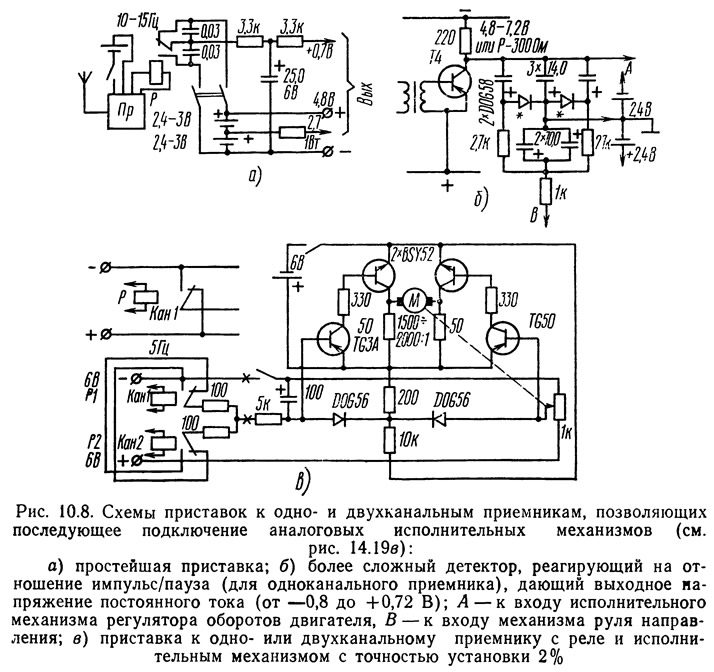
Надо уделить несколько слов, как правило, малоизвестному методу проверки исполнительных механизмов. В случае пропорционального управления проверяют исполнительные механизмы как индивидуально — с потенциометром на входе, так и комплексно — в собранном приемном устройстве при взаимодействии с передатчиком (рис. 10.8).
Испытания начинают со снятия статической характеристики. Для этого подают на вход механизма определенное значение сигнала (напряжение — через потенциометр или движение ручки ) правления в передатчике) и устанавливают соответствующую этому выходную величину сигнала (отклонение руля), но лишь тогда, когда заканчиваются колебательные процессы и схема оказывается в состоянии покоя.
Хороший исполнительный механизм для пропорционального управления должен иметь линейную статическую характеристику, хотя небольшие нелинейные отклонения практически не вызывают никаких неприятностей в полете. Наличие большого разброса значений указывает на наличие погрешности регулирования. Таким образом, статическая характеристика сразу же показывает общую характеристику схемы и позволяет также получить представление о погрешностях регулирования.
Если временные изменения выходной величины (положения руля) определять при скачкообразных изменениях входного сигнала, то получится временная переходная характеристика (характеристика включения). Она покажет время, необходимое механизму для достижения определенного отклонения руля, из чего можно также сделать выводы о «выбегах» и их демпфировании.
Если изменить с определенной постоянной скоростью входной сигнал, наблюдая одновременно за выходным сигналом исполнительного механизма, то можно заметить наличие некоторых расхождений между этими двумя величинами. Обычно это довольно существенный параметр в системе пропорционального управления, а именно так называемая погрешность опережения или отставания, вызывающая угловое расхождение между ручкой управления и рулем. В нашем случае погрешность слежения зависит не только от скорости вращения микродвигателя исполнительного механизма и передачи, но также от задержки в передаче сигналов от передатчика к приемнику. Тут речь идет о так называемой мертвой зоне при полете модели, когда кратковременно теряется радиосвязь. Если это длится лишь некоторые доли секунды, то это не имеет практического влияния на имеющие место в работе механизма изменения (расхождения) скорости.
Если на вход исполнительного механизма подать сигнал синусоидальной формы и сравнить его с выходным, то мы заметим искажения формы и уменьшение амплитуды выходного сигнала по мере роста частоты входного сигнала. Произведя наблюдения при разных частотах, мы можем получить выводы о стабильности системы. Однако поскольку частоты, получаемые на практике, при чаще всего применяемом ручном управлении передатчиком сравнительно малы, то ничтожно мала и вероятность того, что при этом появится нестабильность работы механизма.