
Конструктивно исполнительные механизмы подразделяются на механизмы с приводами: аэродинамическим, резиновым, пружинным, электрическим, пневматическим и гидравлическим. Комплектные же узлы, составленные из исполнительных механизмов и схем обратной связи, приспособленные к системам пропорционального управления, называют исполнительными механизмами пропорционального действия. Ввиду специфики исполнительных механизмов для систем пропорционального управления рассмотрим их раздельно.
Распространение электрических механизмов объясняется их простотой, возможностью питания от одного источника тока, уже имеющегося в модели, возможностью получения значительных управляющих воздействий при использовании легких и экономичных механизмов и наличием в модели однородных электрических устройств. Кроме того, электрические бесконтактные системы, менее чувствительные к повреждениям, проще в эксплуатации, чем пневматические или гидравлические механизмы.
Исполнительные механизмы с электрическим приводом подразделяются на электромагниты и соленоиды, электромагнитные механизмы и механизмы с электрическими микродвигателями.
Электромагниты и соленоиды
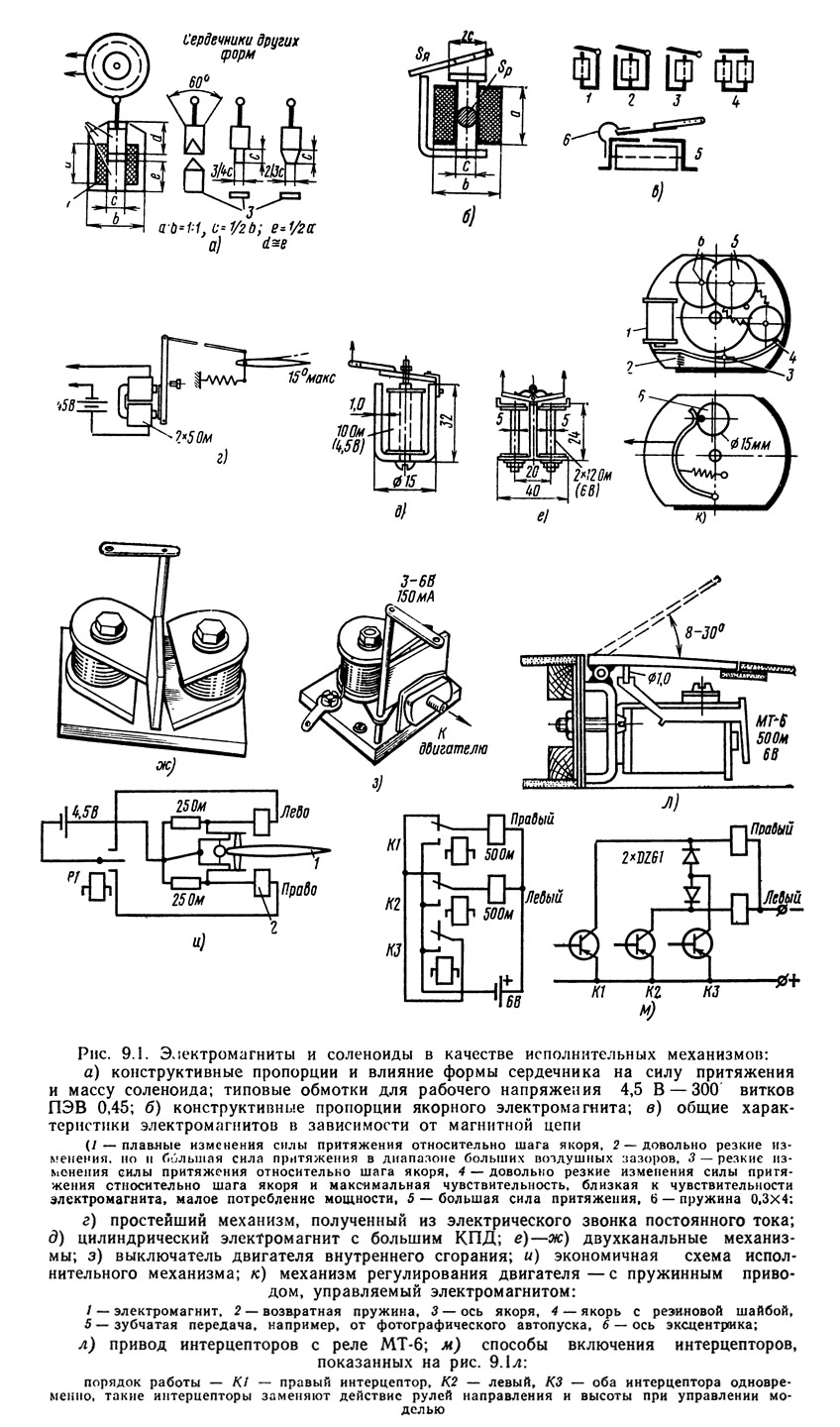
Соленоиды (рис. 9.1 а) являются самыми простыми исполнительными механизмами и состоят из низкоомной катушки, подвижного сердечника и стопы, выполняемых из мягкой стали. Ток, текущий через обмотку, вызывает втягивание сердечника и предельное отклонение руля, связанного с этим сердечником. С момента, когда сигнал прекращается, пружина оттягивает руль в положение нейтрали (одностороннее управление) или в противоположную сторону (двустороннее управление). Соленоиды очень просты и надежны, но достаточно тяжелы и потребляют большой ток.
Якорьковые электромагниты (рис. 9.1 б) выполняют такую же работу, как и соленоиды. Они могут вызвать лишь небольшое отклонение руля, поскольку сила их притяжения обратно пропорциональна квадрату расстояния между якорем и сердечником.
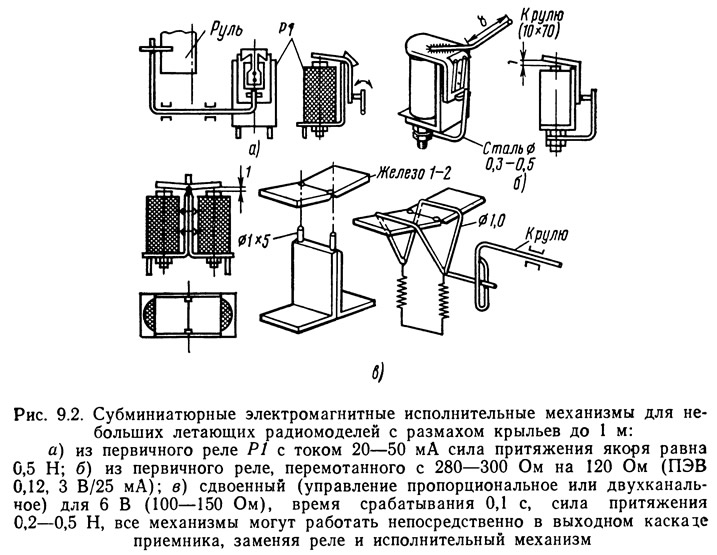
Если увеличить воздушный зазор вдвое, то сила притяжения уменьшится вчетверо, а если увеличить зазор вчетверо, то сила притяжения электромагнита уменьшится в 16 раз. Поэтому при изготовлении приводных электромагнитов стремятся к тому, чтобы они имели зазор только с одной стороны, и увеличивают плечо рулевого рычага, прикрепленного к якорю. Если требуется увеличенный шаг якоря (при одном и том же напряжении питания), то используют электромагниты типа показанных на рис. 9.1 б—ж. Субминиатюрные исполнительные механизмы показаны на рис. 9.2.
Чтобы ускорить действие электромагнита, последовательно с его катушкой включают LC-элемент, состоящий из параллельно соединенных резистора и конденсатора 0—500 мкФ (чем больше емкость, тем больше быстродействие).
Электромагнитные механизмы
Это — двухпозиционные регуляторы, применяемые, главным образом, в простых кодовых системах и простых системах пропорционального управления. Различные виды этих механизмов показаны на рис. 9.3. Способы включения механизма в исполнительную цепь были показаны на рис. 7.7. Вместе с сигналом ток определенного направления, текущий через обмотку, вызывает притяжение или отталкивание одноименного полюса постоянного магнита и его перемещение вместе с толкателем.
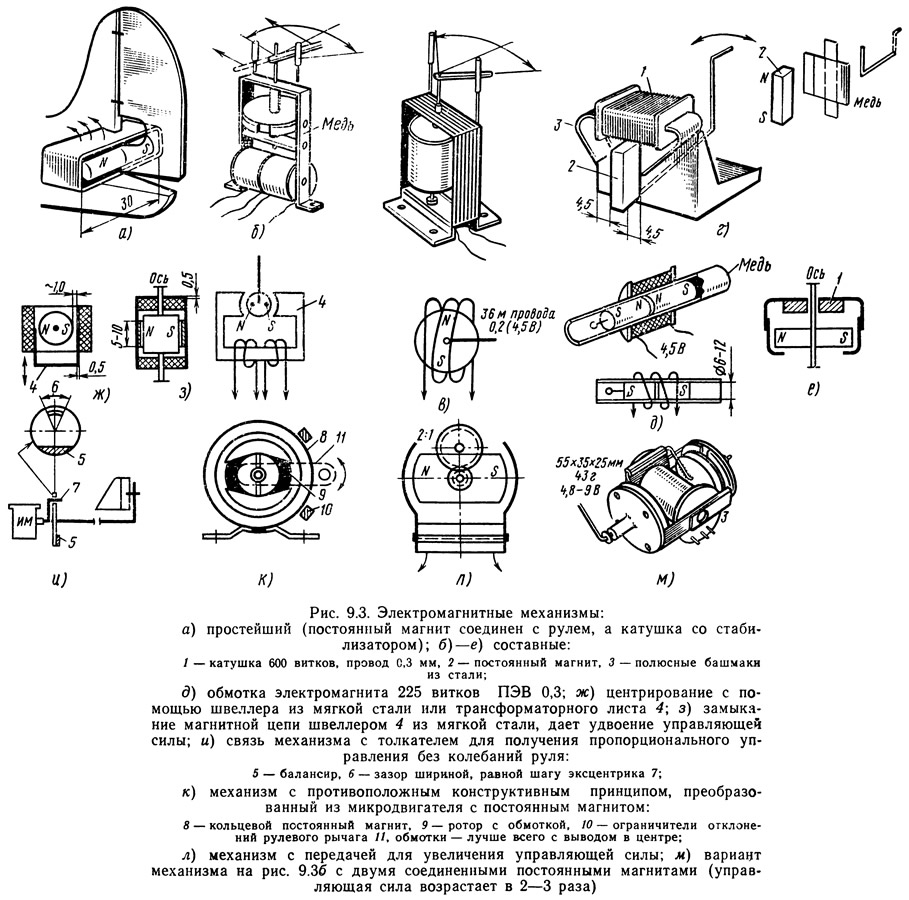
При построении электромагнитных механизмов надо заботиться о том, чтобы воздушный зазор между торцом магнита и полюсным башмаком или обмоткой был как можно меньшим. Используют полюсные башмаки из мягкой стали, изогнутые полукругом или под углом. Поскольку пайка каких-либо деталей к постоянным магнитам сложна, то используют эпоксидную смолу.
Во всех электромагнитных механизмах следует для получения как можно большей управляющей силы установить передаточное отношение так, чтобы как можно больший шаг механизма вызывал меньшее отклонение руля, например 3:1. На практике механизм, показанный на рис. 9.3 б с поворотом магнита в 45°, вызывающий отклонение руля на 15°, обеспечивает достаточную силу для надежного управления тихоходными моделями самолетов с размахом крыльев до 1,8 м и моделей планеров с размахом крыльев до 2,5 м.
Помимо механизмов, непосредственно приводящих в движение руль, можно в малых моделях применять электромагнитный механизм, взаимодействующий с вращающимся рулем с аэродинамическим приводом (см. рис. 6.11 б). Правда, при этом возможно только одностороннее управление — предельное, зато потребление тока при сигнале равно лишь 50 мА/1,5 В. Виражи в противоположном направлении можно получить благодаря действию моментов от воздушного винта.
Электрические микродвигатели
Электрические микродвигатели представляют самые большие возможности для работы исполнительных механизмов и они могут взаимодействовать со всеми системами дистанционного управления. В радиомодельной технике для привода исполнительных механизмов используют исключительно микродвигатели с постоянным магнитом.
Достоинством микродвигателя является компактность его конструкции, небольшое потребление тока, высокие КПД и надежность работы и при этом его легкость. Электрический микродвигатель для исполнительных механизмов должен действовать в любом положении вала, причем при нагрузке. Выполнению этого условия нередко способствует увеличение прижима щеток, а в случае угольных щеток — их притирка в течение долгой работы двигателя без нагрузки. Микродвигатели в механизмах заводского изготовления предварительно притирают в течение двухчасовой работы. Это уменьшает также вредное искрение между щетками и коллектором. Лучше всего микродвигатели промышленного изготовления, быстро вращающиеся с ротором малого диаметра или с чашечным ротором.
Следует добавить, что самый оптимальный режим микродвигателя с постоянным магнитом обеспечивается тогда, когда он потребляет половину суммы токов короткого замыкания (вал заторможен) и холостого хода (без нагрузки) при данном напряжении питания.
Важным фактором является также напряжение трогания ротора двигателя. Его измеряют по меньшей мере 10 раз при различных положениях ротора, получая тот средний результат, при котором микродвигатель начинает работать. Рабочее напряжение микродвигателя в модели должно быть по меньшей мере в 2,5 раза больше его напряжения срабатывания. Добавим, что микродвигатели для исполнительных механизмов должны иметь по меньшей мере пятиполюсный ротор.
Масса типового микродвигателя с постоянным магнитом, используемого в любительских конструкциях, примерно 35—40 г. Он питается напряжением 3—6 В и потребляет (при 6 В) ток короткого замыкания 0,8—2 А и ток холостого хода 0,15—0,2 А при частоте вращения 12 000 об/мин. Обычно такой микродвигатель обладает вмонтированной одноступенчатой передачей с коэффициентом редукции 6÷7:1.
Исполнительные механизмы с электрическим возвратом в нейтраль (или без этого возврата) часто имеют искрение между щетками и коллектором уже в момент вращения. Это создает помехи в управлении, затрудняет точное центрирование и требует применения концевых выключателей. Поэтому можно использовать динамическое торможение микродвигателя, состоящее во включении последовательно с ним небольшого низкоомного реле, контакты которого (нормально замкнутые) включены параллельно зажимам микродвигателя. При регулировке обращают внимание, что если микродвигатель вибрирует, то следует уменьшить диаметр намоточной проволоки в реле, а если он действует с отставанием, то увеличить диаметр этой проволоки.
Редукционные передачи (обычно 40:1) применяют для снижения числа оборотов вала ротора и увеличения полезного вращающего момента. В хороших зубчатых передачах механические потери не превышают, как правило, 5—10% (в червячной передаче они доходят до 55—65%). В настоящее время редукторы изготовляют чаще всего из пластмасс. Такие редукторы прочны, работают бесшумно и эластично и не вызывают электрических помех. Следует добавить, что нейлоновые зубчатые передачи следует в первый период их работы — в период приработки — смазывать маслом. Надо стремиться к тому, чтобы все работающие шестерни были изготовлены из одного и того же материала.
При взаимодействии пластмассового материала с мягким металлом (латунью, алюминием) металлические шестерни должны быть всегда смазанными (колеса из твердого металла не нуждаются в этом случае в смазке). Червячные передачи имеют червячные шестерни из бронзы, латуни или пластмассы, а шестерни — из металла или пластмассы.
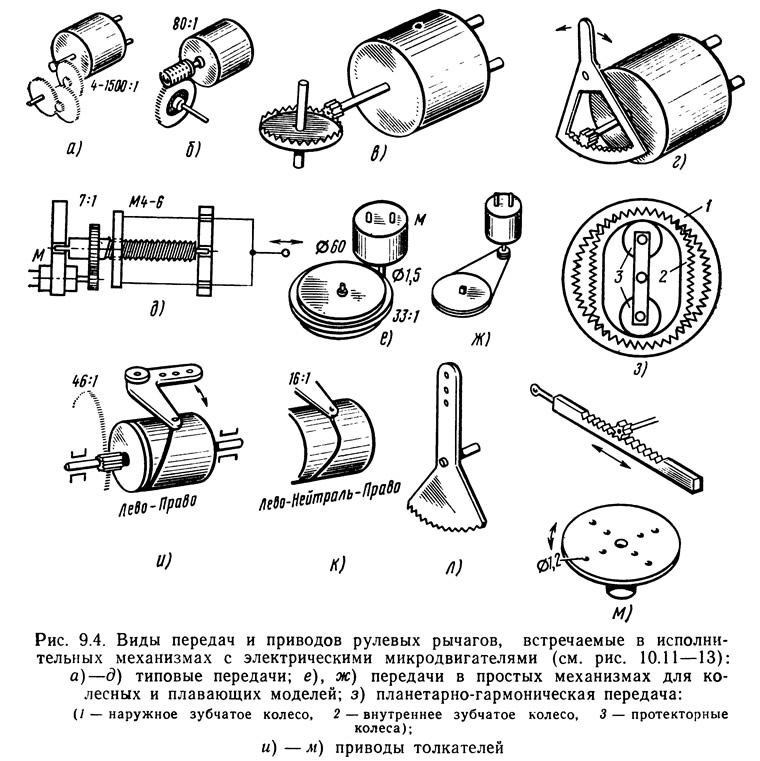
Примеры конструкции типовых передач приведены на рис. 9.4, причем на рис. 9.4 з приведена передача, позволяющая получить большое передаточное отношение в одной ступени. Если наружная шестерня имеет 200, а внутренняя — 198 зубьев, то тогда при неподвижной наружной шестерне получается передаточное отношение 99:1, а при неподвижной внутренней шестерне передаточное отношение равно 100:1. Передачи этого типа впервые применены в 1968 г. в миниатюрных исполнительных механизмах «Digimate» 4 RS.
Хороший двухканальный исполнительный механизм любительской конструкции должен развивать управляющую силу порядка 1,35—1,8 кгс и обеспечивать движения рычага длиной 20 мм в диапазоне 2·30÷45°, иметь время конечного отклонения от нейтрали менее чем 0,5 с, потреблять средний ток до 750 мА, обеспечивать правильное центрирование (около ±0,5 мм), иметь малую инерцию подвижных элементов и обладать механической прочностью, малыми размерами и массой. Типовое передаточное отношение в исполнительных механизмах любительской конструкции равно 235:1 для руля направления, 274:1 для руля высоты и элеронов и 50:1 для регулирования числа оборотов двигателя.
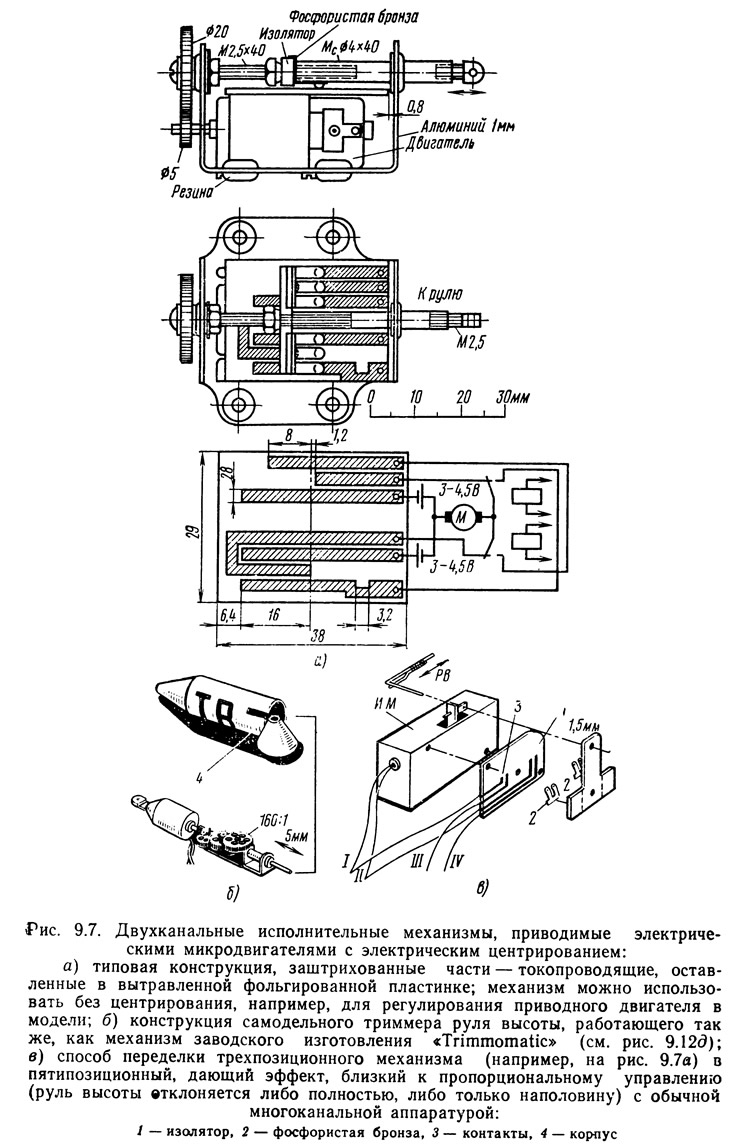
В любительских конструкциях охотнее всего применяют одноступенчатую зубчатую передачу, дополненную ходовым винтом (см. рис. 9.7 а). Благодаря этому достигается меньшая инерция механизма, упрощается конструкция, а также устраняется вредное влияние шестерен с неправильной формой зубьев, не возникают трудности при креплении пластмассовых шестерен. В случае электрического возврата в нейтраль самые лучшие результаты дают скользящие контакты — самоочищающиеся (из фосфористой бронзы), обладающие большой поверхностью (см. рис. 9.7 а).
Исполнительные механизмы с приводом электрическими микродвигателями подразделяются на четыре группы: одноканальные простые, одноканальные составные, двухканальные и пропорционального действия.
Простые одноканальные исполнительные механизмы
В самом простом решении микроэлектродвигатель через зубчатую передачу (от 40:1 до 400:1) отклоняет руль в ту или другую сторону в моменты получения сигналов. Однако этот способ требует наличия у радиомоделиста некоторой сноровки и осторожности в установке руля, который не имеет автоматического положения нейтрали. Можно установить микроэлектродвигатель так, чтобы при сигнале он отклонял руль только в одну сторону, например вправо, а в отсутствие сигнала возвращал руль в нейтраль. В этом случае было бы получено одностороннее дискретное управление.
Устанавливая микроэлектродвигатель так, чтобы в отсутствие сигнала руль отклонялся в одну сторону, а при его наличии — в другую, получим простейшую систему двухканального управления, дискретную или пропорциональную. Положение нейтрали заменяют тогда периодические довольно быстрые движения руля влево и вправо с одинаковыми отклонениями, на которые модель практически не реагирует. В случае выхода из строя радиоустройств руль будет зафиксирован в отклоненном положении. Этому можно противодействовать, применяя концевые контакты (рис. 9.5 а), которые могут быть также использованы для включения дополнительных исполнительных цепей (или для других операций). Концевые контакты можно заменить микровыключателями или же скользящими выключателями.
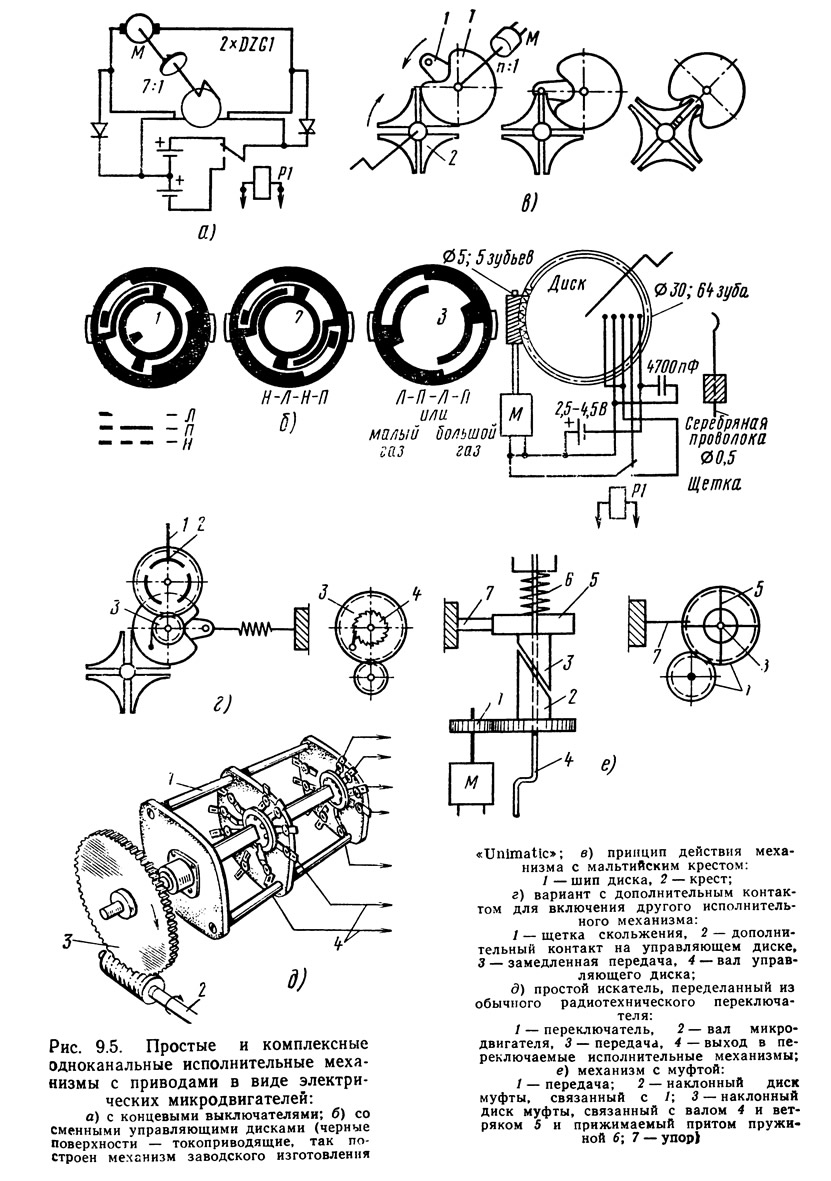
Следующим типом исполнительного механизма является шаговый или вращающийся распределитель. Главной задачей, которую нужно решить, является точность установки и повторимость рабочих положений. Принцип и конструкцию этого типа механизмов иллюстрирует рис. 9.5 б. В этих механизмах надо предусмотреть: выключение микроэлектродвигателя в рабочем положении механизма и одновременно блокирование или фиксирование рычага управления. В самых простых устройствах достаточно только выключения микроэлектродвигателя, который благодаря само-тормозящейся передаче, например червячной, блокирует одновременно рулевой рычаг в данном рабочем положении.
Применяя это решение, надо помнить о необходимости использования микроэлектродвигателей с постоянным магнитом большой мощности и с быстрым торможением микродвигателя после отключения питания. Однако этого трудно добиться без применения очень высоких передаточных отношений. Все это приводит к тому, что такой исполнительный механизм работает не очень быстро. Таким образом, видно, что простота конструкции здесь достигается за счет достаточной быстроты действия. Несмотря на это, исполнительные механизмы, основанные на этом принципе, в течение многих лет серийно выпускались зарубежными фирмами и предназначались, главным образом, для плавающих и колесных моделей, а также для однокомандных летающих моделей, особенно планеров.
Несколько иную конструкцию имеет механизм, в котором нет микроэлектродвигателя, а рулевой рычаг зафиксирован. Не новым, но очень хорошим решением тут является использование так называемого мальтийского креста, известного в кинотехнике. Принцип конструкции показан на рис. 9.5 а. В этой системе распределительный диск Т и приводной микроэлектродвигатель с передачей смещаются после выключения питания со своего рабочего положения, так как рулевой рычаг, соединенный с крестом, не изменяет при этом своего положения. Этот принцип можно использовать также в случае применения зубчатой передачи, благодаря чему удается уменьшить размеры механизма.
Дальнейшим развитием является применение муфты, фиксирующей механизм в отдельных положениях покоя (рис. 9.5 е). И тут положение рулевого рычага не зависит от немедленного затормаживания электрического микродвигателя. Условием правильной работы механизмов этого типа является точность их исполнения. При надлежащем исполнении таких механизмов они обладают еще и тем достоинством, что совершенно нечувствительны к ударам и вибрациям.
Составные одноканальные исполнительные механизмы
К этой группе относятся все исполнительные механизмы, которые, несмотря на то, что они обслуживаются по одному каналу, могут выполнять много операций, иногда даже одновременно. Механизмы этого типа особенно распространены в США, в Европе же они встречаются очень редко. Осуществление данной операции происходит путем посылки определенного числа импульсов или же путем посылки импульсов в определенном ритме (с шифром), например: короткий — длинный — короткий. Иногда применяют комбинацию обоих этих методов.
В самом простом исполнении такой составной механизм ничем не отличается от простого механизма. Если к любому простому механизму добавить рабочий контакт для дополнительного исполнительного механизма, то получим составной механизм. Например, если дополнить мальтийский крест приставкой так, как показано на рис. 9.5 г, то получим устройство, в котором распределительный диск сможет работать уже при коротких импульсах, при этом крест переключать не будет.
Распределительный диск под действием возвратной пружины будет возвращаться в исходное положение, а поскольку он оснащен еще и так называемым «свободным ходом», то можно при возврате распределительного диска переключать дополнительную контактную пластинку и включать другие цепи. Этот механизм работает следующим образом: длинные импульсы или непрерывный сигнал — работа нормального одноканального механизма, короткие импульсы — дополнительные операции.
Следует добавить, что, как правило, в исполнительных механизмах этого типа трудно создать соответствующий короткий импульс в манипуляторе передатчика, а при понижении напряжения, питающего исполнительный механизм, его характеристика сильно изменяется. Исполнительные механизмы этого типа чаще всего применяют для колесных и плавающих моделей.
До сих пор мы рассматривали механизм, сочетаемый с одной дополнительной операцией, но на практике имеются механизмы, позволяющие включение даже пяти операций. Принцип действия таких механизмов объяснен на примере рис. 6.11 а. Правда, он касается звездообразного распределителя с резиновым приводом, но замена резины электрическим микродвигателем, а механического упора — кулачком, переключающим соответствующие контакты, дает механизм с электрическим приводом.
Все составные механизмы этого типа можно рекомендовать только для колесных и плавающих моделей. Когда работают с летающими моделями, то нет времени задумываться над характером отдельных управляющих импульсов и их шифром. Существующие манипуляторы (см. рис. 3.8; рис. 3.9) пригодны только для самых простых составных исполнительных механизмов с одной дополнительной операцией.
Двухканальные исполнительные механизмы
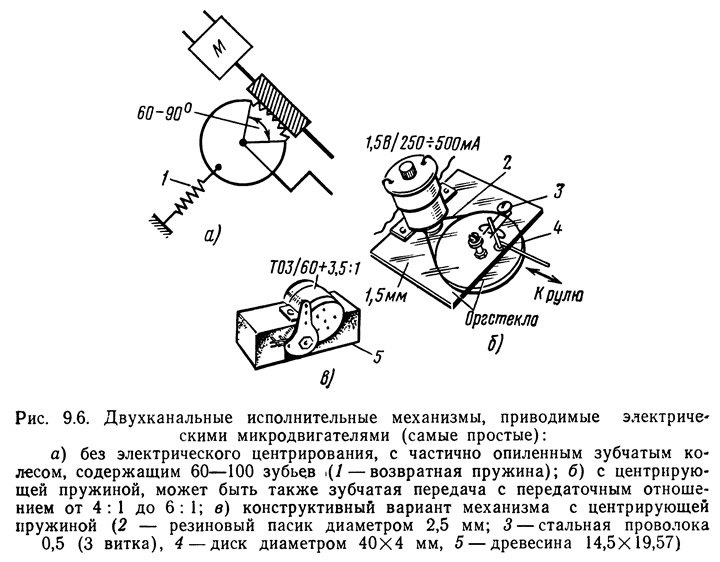
Одним из вариантов простого исполнительного механизма с автоматическим возвратом в нейтраль является конструкция двухканального механизма, показанного на рис. 9.6. Возврат в нейтраль здесь происходит под действием возвратной пружины. К сожалению, она должна быть довольно сильной, что понижает эффективную управляющую силу механизма.
Пытаются также обеспечить возврат в нейтраль электрическим путем. Пример такого решения приведен на рис. 9.7. Тут следует упомянуть об известном парадоксе: из теории следует, что чем меньше число электрических контактов, тем больше надежность работы исполнительного механизма. На практике же оказалось, что самым лучшим исполнительным механизмом был механизм фирмы Bonner «Duramite» с электрическим возвратом в нейтраль. Этот механизм был надежным, прочным, работал быстро и всегда с определенным положением нейтрали. Конструкция его показана на рис. 9.12 г. Исполнительные механизмы с механическим возвратом в нейтраль типа «Bellamatic-II» имеют замедленный возврат в нейтраль. При возврате руль этого механизма перекладывается в противоположное направление, а центрирующая пружина после нескольких сотен или нескольких тысяч отклонений руля уже подвергается «усталостному» разрушению, ломается.
Исполнительный механизм с центрирующей пружиной «Bellamatic-II» (см. рис. 9.12 ж) оснащен микроэлектродвигателем «Micromax» ТОЗ со встроенной планетарной передачей 59:1. Дополнительная зубчатая передача 2:1 обеспечивает плавное отклонение руля, причем на полное отклонение руля приходится 25 поворотов вала электрического микродвигателя. Муфта скольжения (как и центробежная муфта) защищает микроэлектродвигатель от повреждения во время приземления модели, когда руль модели часто подвергается ударам, передаваемым через жесткие толкатели на исполнительный механизм.
При типовом включении (рис. 9.8 д) этот механизм возвращается в нейтраль замедленно, так как тогда он работает в качестве генератора. Чтобы избежать этого, применяют питание от двух источников или же добавляют схему рис. 9.8 е. Это могут быть любые транзисторы, даже субминиатюрные, включенные как диоды или же диоды с очень малым сопротивлением в прямом направлении (около 0,5—3,0 Ом). На преодоление сопротивления центрирующей пружины расходуется до 30—40% мощности микродвигателя.
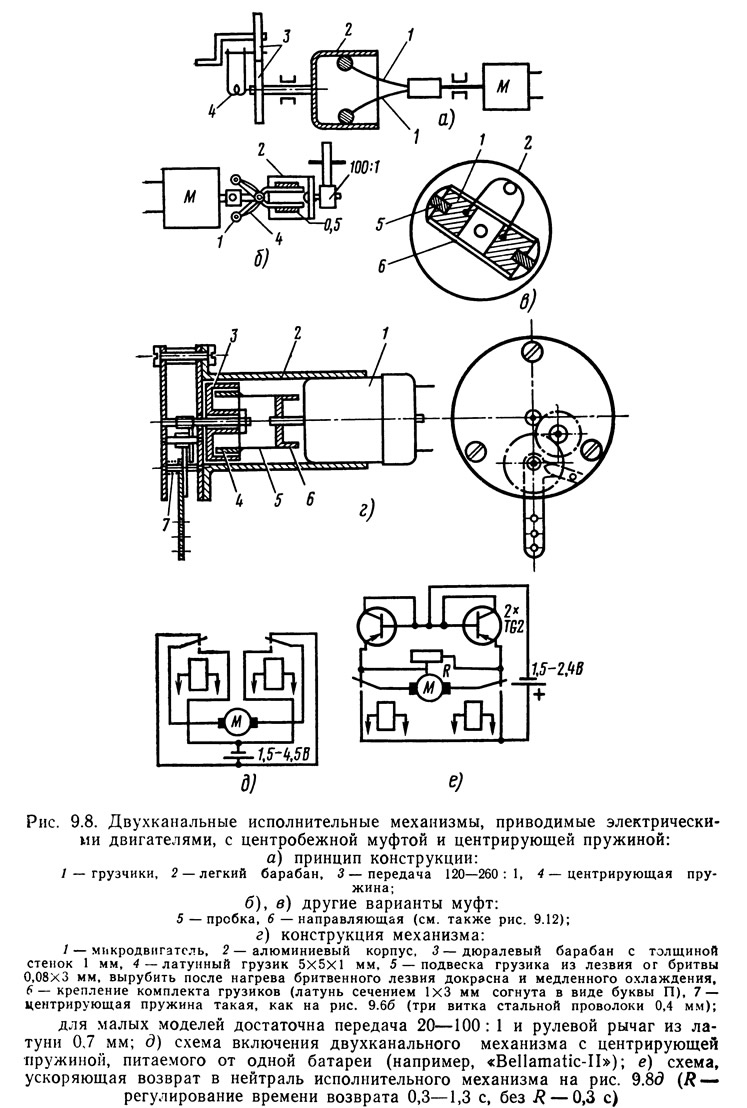
Исполнительный механизм «Variomatic» оснащен микроэлектродвигателем «Mitsumi» и нейлоновыми зубчатыми колесами. Центробежная муфта, принцип которой представлен на рис. 9.12 в, состоит из следующих деталей: 1 — диск, установленный на валу микродвигателя и разделенный на четыре одинаковые секции, содержащие по три металлических шарика; 2 — пластмассовый барабан; 3 — металлические шарики; 4 — колесо, действующее на зубчатую передачу (не показанную на рисунке). При работе микродвигателя двенадцать шариков перемещаются к краю диска, связывая его с барабаном, который, в свою очередь, приводит в движение зубчатую передачу.
Несмотря на оговорки, следует признать конструкцию механизма с центробежной муфтой или муфтой скольжения и с центрирующей пружиной самым лучшим техническим решением в этой области. Большая управляющая сила при небольшой центрирующей силе и отсутствие электрических контактов являются достоинствами такого механизма. Принцип его действия иллюстрирован рис. 9.8 а. Сцепление микроэлектродвигателя с зубчатой передачей происходит только тогда, когда он работает. Когда микродвигатель выключен, центрирующая пружина преодолевает только сопротивление руля, находящегося в положении нейтрали, и вращает ненагруженную зубчатую передачу. Следовательно, ей не приходится вращать ротор, на что при высокоэффективных микродвигателях с постоянным магнитом требуется приложение довольно большой силы. Следующим достоинством муфты является то, что при крайних отклонениях руля электрический микродвигатель не выключается, а только притормаживается, что уменьшает потребление тока.
Механизм с центробежной муфтой показан на рис. 9.8 г. В механизмах заводского изготовления барабан муфты изготовляется из пластмассы, стойкой к истиранию, что одновременно делает устройство менее шумным в работе. Работа любительских механизмов этого типа характеризуется резким свистом, возникающим вследствие скольжения грузиков муфты по внутренней поверхности металлического барабана. Нужно заметить, что в этих механизмах муфты подвергаются довольно быстрому износу — истиранию, вследствие чего с течением времени уменьшается сила, удерживающая руль в отклоненном положении.
Схема включения исполнительного механизма с центробежной муфтой или муфтой скольжения в цепь реле показана на рис. 9.8 д.
Рассматривая различного типа исполнительные механизмы, нельзя не упомянуть о механизме, использующем явление центробежной силы. Такой механизм почти идеален, так как он делает ненужными как муфту, так и зубчатую передачу. Управляющая сила при этом очень велика и поддается регулированию путем изменения частоты вращения электрического микродвигателя и соответствующего подбора размеров грузиков.
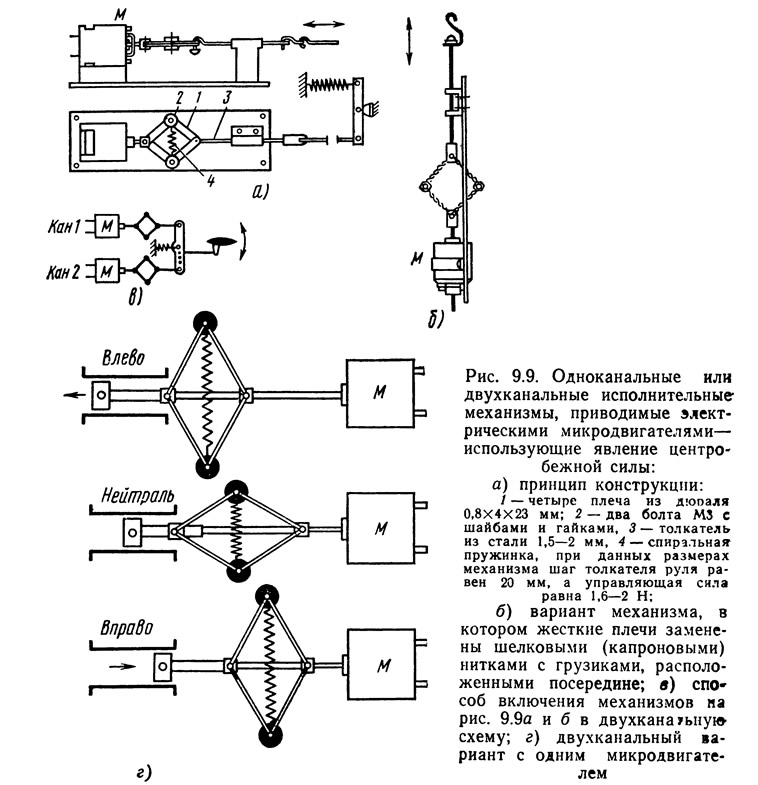
К сожалению, такой механизм имеет и недостатки. Дело в том, что центробежная сила действует только в одном направлении (от центра наружу), независимо от того, вращается ли вал микроэлектродвигателя влево или же вправо. Следовательно, изменение направления вращения микродвигателя не вызывает никаких изменений в отклонениях руля. Желая получить двухканальный механизм, мы вынуждены использовать два механизма (рис. 9.9 в).
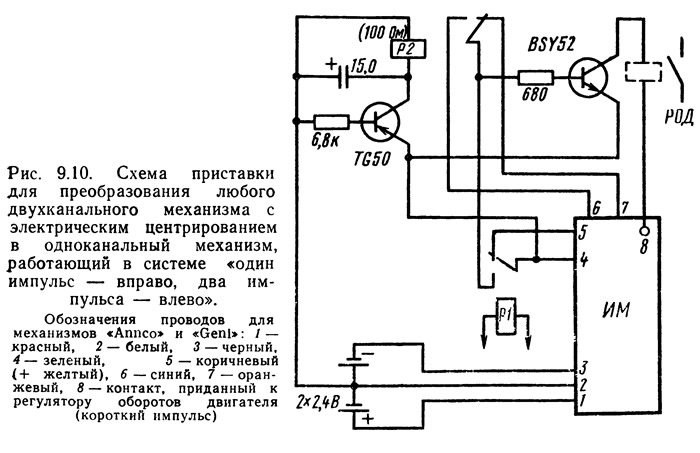
Существует теоретическая возможность создания очень простого исполнительного механизма, основанного на этом же принципе и пригодного для управления по двум каналам (рис. 9.9 г). Однако все прежние попытки построения такого механизма не дали положительных результатов (рис. 9.10).
Исполнительные механизмы с транзисторными усилителями, появившиеся в последние годы, являются только вариантом рассмотренных выше основных решений. Усилители и переключатели на транзисторах заменяют контакты и реле, благодаря чему возрастает надежность действия исполнительных механизмов и самих систем. Очень часто механизмы этого типа заводского изготовления продают с предупреждением о том, что непрерывный сигнал, включающий механизм, не должен длиться больше чем от 2 до 30 с, так как иначе транзистор может выйти из строя. Поскольку принцип нормального управления моделями заключается в посылке коротких импульсов (а не непрерывных сигналов), то такое предупреждение не очень страшно для опытных радиомоделистов. Примеры исполнительных механизмов с транзисторами приведены на рис. 7.3.