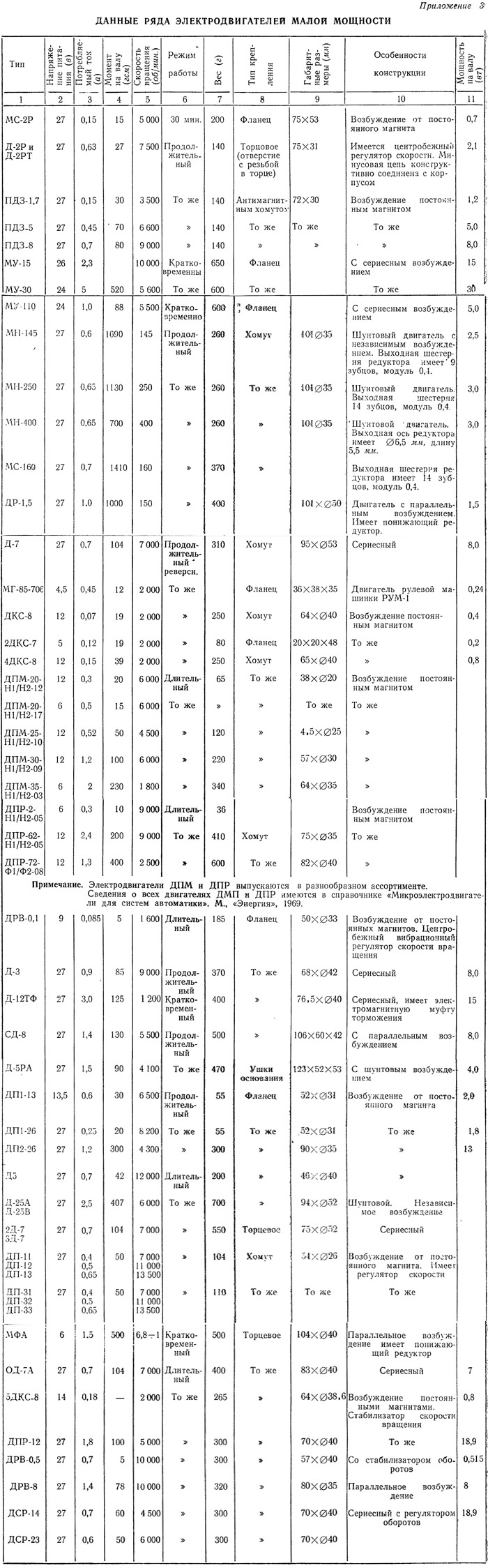
При выборе типа ходового электродвигателя для радиоуправляемой автомодели следует исходить из того, какова предполагаемая скорость ее движения, а также каковы ее вес и диаметр ведущих колес.
Задаваться скоростью движения радиоуправляемой автомодели «классического типа» (см. также главу 6) более 5 км/час не следует, поскольку при большей скорости очень трудно управлять на расстоянии ее движением по сложной трассе.
Вот какова последовательность расчетов при подборе двигателя.
Без учета пробуксовки колес скорость модели (в км/час) составит:
где 2πr — длина окружности колеса, м;
n — число оборотов ведущего колеса в минуту;
0,06 — коэффициент, переводящий скорость из м/мин в км/час.
Учтите теперь, что за счет пробуксовки колес реальная скорость получится на 10% ниже расчетной.
Из предыдущей формулы определяется число n:
где nдв — число оборотов электродвигателя в минуту;
i — передаточное число понижающего редуктора.
Мощность электродвигателя должна быть достаточной, чтобы развить необходимое тяговое усилие на ведущих колесах. Тяговое усилие на ведущем колесе составит в кг:
где Мкол — крутящий момент на ведомом колесе, кем;
r — радиус ведущего колеса, м.
С учетом понижающего редуктора крутящий момент на ведущем колесе составит:
где Мдв — крутящий момент, развиваемый на валу электродвигателя, кгм;
i — передаточное число понижающего редуктора.
Из практики известно, что тяговое усилие на колесе составляет 18÷20% веса модели.
Если в паспорте двигателя нет данных о развиваемом двигателем крутящем моменте, а показана только мощность в ваттах, то определить крутящий момент можно по формуле:
где N — мощность двигателя, л.с.
n — число оборотов двигателя в минуту.
Напомним, что одна лошадиная сила равна 736 вт. Определив тип двигателя, передаточное отношение редуктора и радиус колеса, переходите к выбору источников питания двигателя.