Селекторные блоки
Для радиоуправления моделями, как правило, применяется аппаратура командной радиолинии с ограниченным числом каналов. Для управления многокомандной моделью аппаратура бортовой автоматики усложняется.
Несколько каналов радиолинии служат для прямой передачи ходовых команд, а по одному или двум каналам передаются сигналы управления блоком автоматики с шаговым искателем, который обеспечивает па модели выдачу командного сигнала на включение или выключение исполнительных элементов и механизмов. Рассмотрим ряд схем модельной автоматики с шаговым искателем и без него.
Коротко о шаговом искателе.
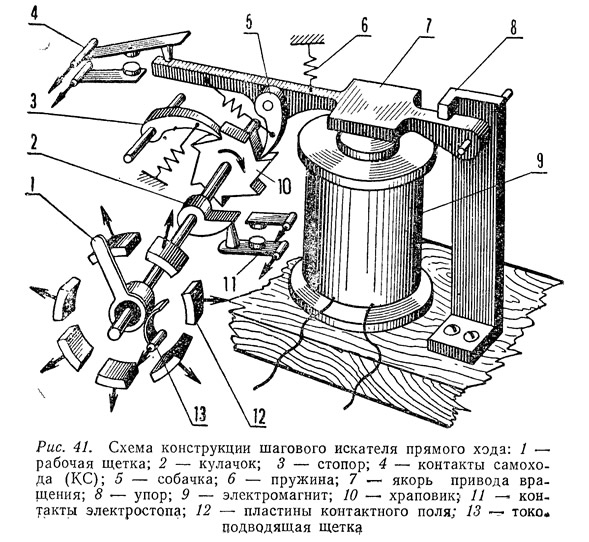
Шаговые искатели (ШИ) применяются на автоматических телефонных станциях (АТС) и в других устройствах автоматики. Основные узлы шагового искателя — пульс-мотор и узел коммутации. На рис. 41 дана схема шагового искателя прямого хода, где детали пульс-мотора отмечены позициями 3,5÷10, а детали узла коммутации — 1,2, 4, 11÷13. При подаче импульса тока обмотке электромагнита 9 к сердечнику обмотки притягивается якорь 7; собачка 5 поворачивает храповик 10 на угол одного зуба, а закрепленная на оси храповика щетка 1 перейдет с одной пластины (ламели) контактного поля 12 на соседнюю. Таких переходов-шагов будет столько, сколько будет подано в обмотку электромагнита импульсов тока. Через токопроводную щетку 13 в ламель контактного поля, у которой остановилась вращаемая щетка 1, может быть послан ток для воздействия на исполнительную цепь, подключенную к этой ламели.
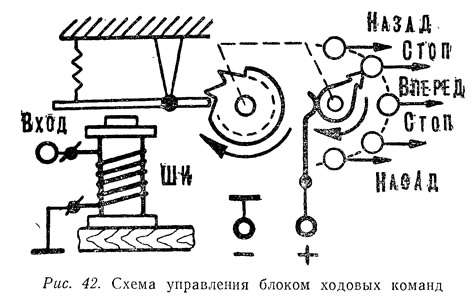
Существуют разные конструкции промышленных шаговых искателей и реле-искателей (РИ). Для моделизма приемлем ШИ-11, рассчитанный на 24 в (ШИ-11, паспорт РС3.250.012Д или РС3.250.013Д). Часто моделисты сами делают простые шаговые искатели или приспосабливают реле-искатели или электромеханические счетчики импульсов. При наличии шагового искателя с контактным полем, у которого число ламелей кратно четырем, на модели для ее управления может быть применен селекторный блок с одноканальпым входом (рис. 42).
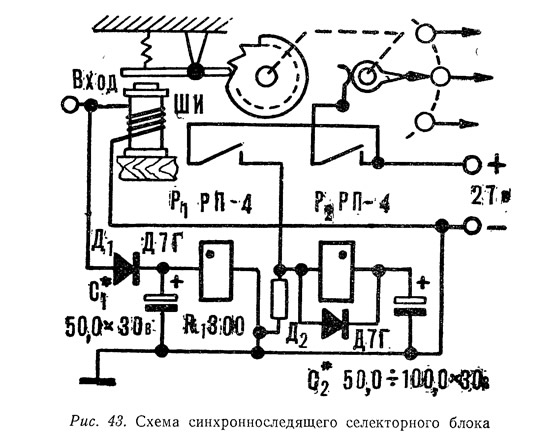
С шаговым искателем упрощенной конструкции можно сделать синхронно следящий селекторный блок (рис. 43). Работает он так. Когда на его вход от реле приемника поступает серия командных импульсов тока, то пульс-мотор поворачивает щетку на нужную ламель. За время первого импульса через диод Д1 зарядится конденсатор С1 и одновременно сработает реле P1, в свою очередь, через его контакты и диод Д2 в обход обмотки реле Р2 зарядится конденсатор С2. В интервалах между командными импульсами за счет заряда конденсатора С1 реле P1 продолжает находиться в сработавшем состоянии. После окончания передачи командных импульсов конденсатор С1 разрядится через обмотку реле Р1, и оно выключится. В это время через обмотку реле Р2 и резистор R1 станет разряжаться конденсатор С2. Реле Р2 импульсно сработает и к остановившейся щетке шагового искателя кратковременно (на 1 сек.) подключится напряжение бортовой сети (27 в). Таким образом, автоматически будет подан сигнал на срабатывание узла автоматики исполнительного элемента, управляемого с данной ламели контактного поля шагового искателя. Если интервалы в серии командных импульсов велики, то конденсатор С1 берется с большей емкостью. Определяется это опытным путем. Реле P1 и Р2 должны быть чувствительные. Это поляризованные реле от приемника РУМ-1 или реле типа РП-4. На схеме точкой показан вывод обмотки, предназначенный для подключения к плюсу питания.
Особого внимания заслуживают системы с числоимпульсным методом передачи команд.
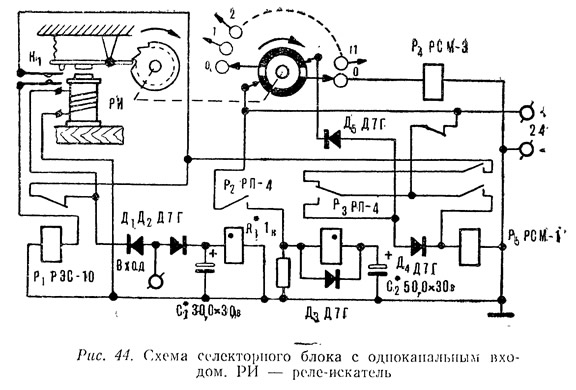
На рис. 44 приведена схема селекторного блока с одноканальным входом. После подачи серии командных импульсов тока на его вход импульс тока исполнения (КС) реле-искателя. Как только импульс исполнения контактного поля реле-искателя. Затем блок приходит в исходное состояние. В момент выдачи импульса исполнения срабатывает и самоблокируется реле Р5, подготовив цепь подачи плюса бортсети на контакты самохода (КС) реле-искателя. Как только импульс исполнения кончится (контакты реле Р3 пришли в исходное состояние), плюс бортсети через нормально замкнутые контакты реле P1 будет подведен к обмотке реле-искателя, оно сработает, и контакты самохода замкнутся, затем сработает реле Р1 и обесточит обмотку реле-искателя и контакты самохода разомкнутся. В результате выключится реле P1. Так будет повторяться до тех пор, пока щетки контактного поля, скользящие по ламелям, не придут в нулевое положение. Тогда сработает реле Р4 и будет снято напряжение с цепей самохода реле-искателя и самоблокировки реле Р5. Блок опять в исходном состоянии. Можно подавать следующую команду. Аналогичную задачу, но с применением шагового искателя ШИ-11 решает блок, схема которого дана на рис. 45.
Селекторный блок управляется по шестому каналу радиолинии. Исполнительную цепь выбирает шаговый искатель ШИ-11. На вход селекторного блока от первичного реле приемника поступают импульсы тока. Ток в обмотку пульс-мотора шагового искателя подается через контакты промежуточного реле Р1. В это время пульс-мотор шагового искателя поворачивает щетку 1 на нужную ламель. При первом импульсе конденсатор С1 зарядится через диод Д2. Одновременно сработает реле Р2 и через его контакты и диод Д3, в обход обмотки реле Р3, зарядится конденсатор С2. В интервалах между командными импульсами реле Р2 остается в рабочем положении, но по окончании передачи серии импульсов конденсатор C1 разрядится через обмотку реле Р2, и оно выключится. Сразу же после этого станет разряжаться конденсатор С2 через обмотку реле Р3 и резистор R1. Реле Р3 импульсно сработает и к остановившейся щетке шагового искателя кратковременно (на 1 сек.) подключится напряжение бортсети (27 в). Так будет подан сигнал для «срабатывания» автоматики исполнительных элементов.
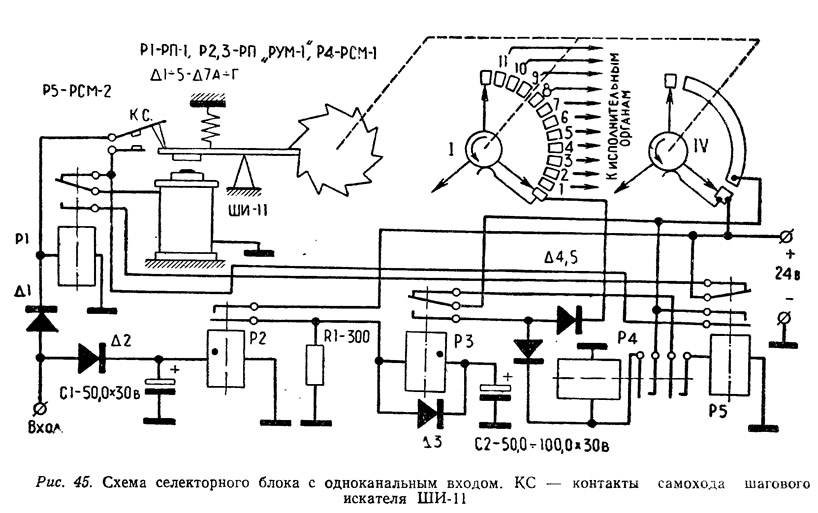
В целях возврата системы в исходное состояние в момент выдачи импульса «исполнения» реле Р4, сработав, подготавливает цепь включения реле Р5; оно включится при размыкании контактов реле Р3. В результате через нормально замкнутые контакты реле P1 подается напряжение на обмотку шагового искателя. Теперь контакты самохода (КС) включат реле Р1, которое прервет подачу тока в обмотку электромагнита шагового искателя. Якорь шагового искателя, придя в исходное состояние, разомкнет контакты самохода, обмотка реле P1 снова обесточится, и цикл начнет повторяться до тех пор, пока щетка IV не сойдет с широкой ламели.
Чтобы на работу шагового искателя не влияло существенно снижение напряжения у аккумуляторной батарей, питающей электрическую бортовую сеть модели, у шагового искателя ШИ-11 необходимо удалить II и III ламельные поля и скользящие по ним щетки, а также заменить плоскую возвратную пружину на спиральную.
Если интервалы в серии командных импульсов велики, то нужна большая емкость конденсатора С3, которая определяется при регулировке. Реле Р2 и Р3 должны быть чувствительными — типа РП-4 или от приемника РУМ-1. Точкой па схеме показан плюсовой вывод обмотки.
Этот селекторный блок безукоризненно работал на модели танка, сделанной Л. С. Кинцбергом.
Блоки ходовых команд
Ходовые электродвигатели на радиоуправляемой автомодели могут быть разных типов: шуптовые, сериесные и с возбуждением от постоянных магнитов в статоре. Применение шунтовых электродвигателей МН-145 и МН-250 исключает необходимость изготавливать понижающий редуктор. У электродвигателя с шунтовой обмоткой для перемены направления вращения якоря меняют направление тока в шунтовой обмотке.
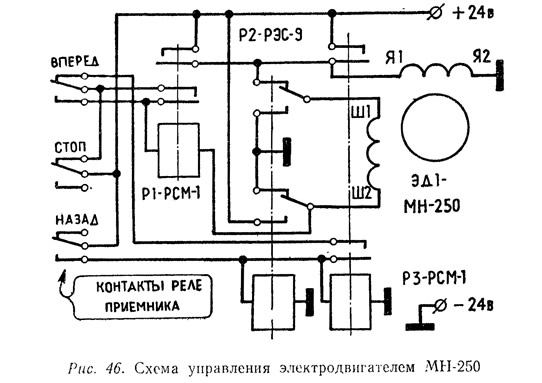
На рис. 46 приведена схема управления шунтовым электродвигателем МН-250. При использовании предлагаемого блока ходовые команды можно подавать в любой последовательности. Возможно, что после монтажа блока на модели направление вращения якоря электродвигателя не будет совпадать с командой. В этом случае надо поменять местами подключение концов Ш1 и Ш2.
Этот блок предназначен для колесной автомодели. Радиоуправление моделями на гусеничном ходу имеет свою специфику. Управление движением может осуществляться пятью командами: «Вперед», «Стоп», «Назад», «Разворот влево» (вокруг левой застопоренной гусеницы), «Разворот вправо» (вокруг правой застопоренной гусеницы). Решение такой задачи обеспечивает блок ходовых команд, схема которого дана на рис. 47. Система автоматики такова, что после прекращения подачи команды на разворот модель продолжает движение по прямой, вперед или назад, в зависимости от того, какая команда исполнялась до разворота. Поэтому модель может двигаться но извилистому маршруту, почти не снижая скорости.
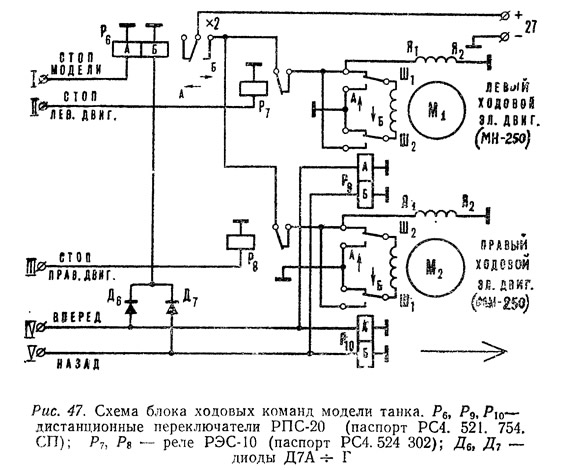
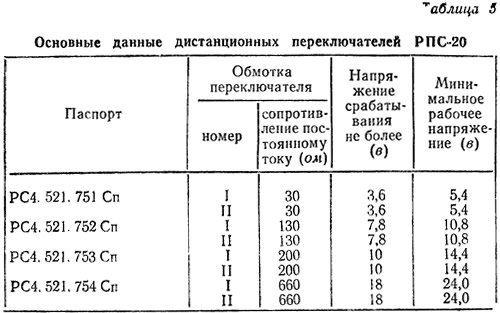
В блоке применены два реле типа РЭС-10 и три дистанционных переключателя типа РПС-20 (паспорт РС4. 521.754 Сп). РПС-20 — двухпозиционное, двухобмоточное реле с механической блокировкой.
При подаче импульса тока в обмотку Б реле Р6 подается напряжение па ходовые электродвигатели МН-250 каждой гусеницы. Реле Р9 и P10 переключают шунтовые обмотки электродвигателей, меняя полярность питания на выводах Ш1 и Ш2. Якорь электродвигателя при этом получает возможность вращаться в другую сторону. Реле Р7 или Р8 — каждое в отдельности — прекращает на время действия команды поворота подвод питания к одному из ходовых электродвигателей. В результате модель поворачивается.
Применение дистанционного переключателя типа РПС-20 существенно упрощает схемы автоматики. Износоустойчивость этого переключателя при активной нагрузке контактов постоянным током 2 а Х 32 в или 3 а Х 20 в — 10 000 срабатываний.
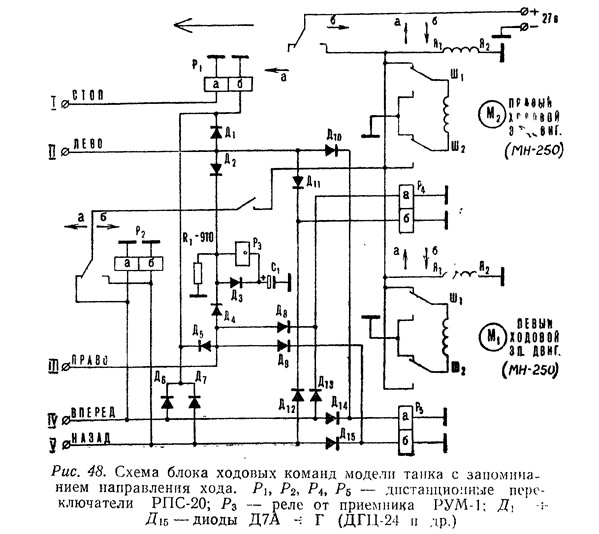
Быстрый разворот гусеничной модели можно осуществить и без предварительной подачи ходовых команд: «Вперед» или «Назад». В этом случае оси якорей электродвигателей вращаются в противоположных направлениях. Эта задача обеспечивается блоком, схема которого показана на рис. 48. После разворота модель будет двигаться в направлении, соответствующем последней поданной команде. Это обеспечит узел на реле Р3, который после снятия команды на разворот выдает импульс напряжения, поступающий через подготовленную с помощью реле Р2 цепь на клеммы управления «вперед» или «назад».
Этот и предыдущий блоки успешно работали на модели танка, изготовленного Л. С. Кинцбергом.
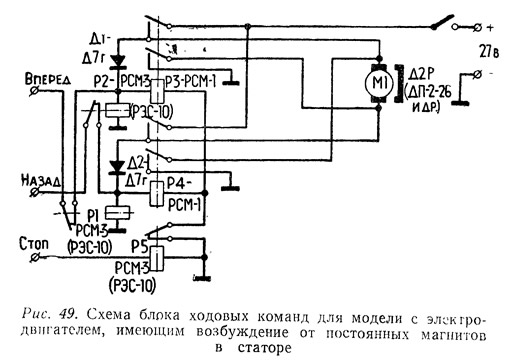
Рассмотрим, как решается задача управления электродвигателем с возбуждением от постоянных магнитов в статоре. На рис. 49 приведен вариант схемы блока ходовых команд для этой цели. От приемника на входные цепи («вперед», «стоп», «назад») подаются короткие командные положительные импульсы напряжения бортсети. После того как модель начала выполнять ходовую команду, например «Вперед», противоположная команда, в данном случае «Назад», может быть исполнена только после команды «Стоп». Такую блокировку обеспечивают реле Р1 и Р2. Реле Р3 и Р4 поочередно (после соответствующей команды) подключают к электродвигателю питание в нужной полярности. Реле Р5 разблокирует реле Р3 или Р4 при подаче команды «Стоп». Диоды Д1 и Д2 в прямом направлении обеспечивают самоблокировку реле Р3 и Р4, и в то же время предохраняют контакты первичных реле приемника оттого, чтобы через них (во время подачи команды) не пошел ток электродвигателя.
Ниже в схемах аппаратуры на конкретных моделях приведены другие варианты управления ходовыми электродвигателями.
Блоки исполнительных механизмов
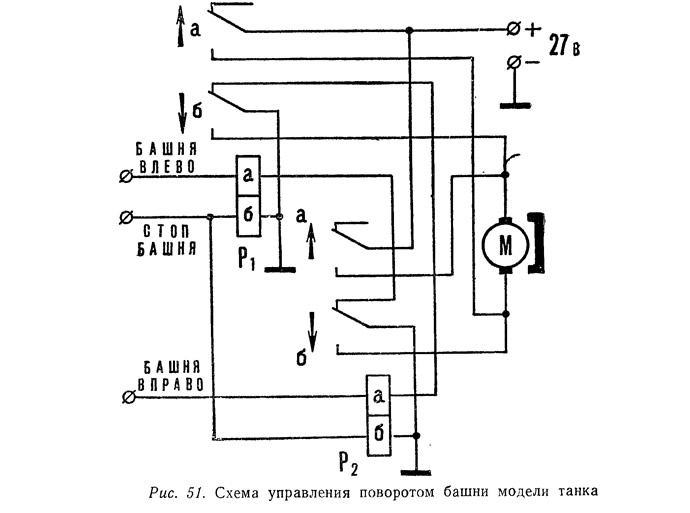
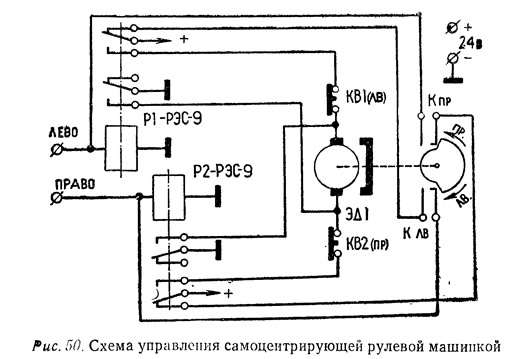
На рис. 50 приведена схема управления рулевым электродвигателем, которая обеспечивает возврат рулевого механизма в исходное («нулевое») положение после прекращения подачи рулевой команды. Следует иметь в виду, что при повороте рулевого механизма влево от нулевого положения замкнутся контакты самоцентровки ЛВ, а при повороте вправо замкнутся контакты самоцентровки ПР. Для управления электродвигателем поворота башни модели танка рекомендуем схему, приведенную на рис. 51.
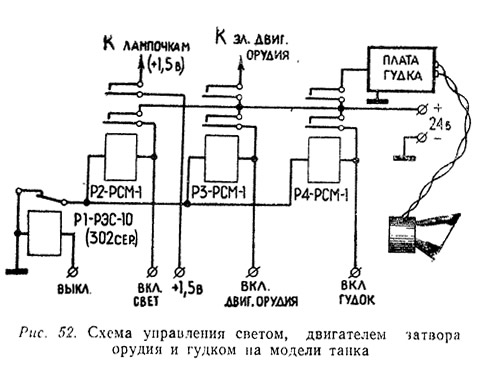
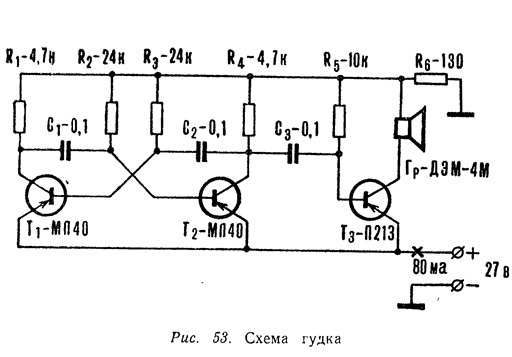
В тех случаях, когда исполнители на модели действуют в разное время, можно установить одно выключающее реле, как это показано на рис. 52. Плата гудка собирается по схеме, данной на рис. 53.
В электронной системе подачи гудка на тембр звука влияет подбор конденсаторов С1 и С2. При исправных деталях система начинает работать сразу и регулировки не требует. Гудок получается громким и естественным.