
Для того чтобы управляемый объект выполнил нужную операцию, ему по каналу связи передается соответствующая команда. В простейшем случае каждая из команд может передаваться по отдельному каналу связи. Практически для управления неподвижным объектом эту систему можно осуществить, применив многожильный кабель.
Для управления по радио подвижными объектами, в том числе моделями, передача ряда не связанных между собой команд осуществляется по одному и тому же каналу связи, на одной несущей частоте. Такая система дистанционного управления именуется командной многоканальной радиолинией.
Если аппаратура многоканальной радиолинии предназначена для передачи конкретного числа команд, то ее принято называть по числу команд, например шестикомандная аппаратура. По способу разделения каналов на приемной стороне многоканальные радиолинии подразделяются на радиолинии с частотным и кодовым разделением каналов.
Для управления моделями в основном применяются радиолинии с частотным разделением каналов, у которых напряжение несущей частоты передатчика модулируется вспомогательными, так называемыми поднесущи-ми колебаниями. Каждому каналу соответствует своя под-несущая частота, которая, в свою очередь, модулируется при передаче команды по амплитуде или частоте. Распространены также системы, в которых поднесущие частоты различаются длительностью посылок колебаний.
Для того чтобы разделить модулированные частоты и подвергнуть их демодуляции, в приемнике после детектора устанавливается ряд селективных фильтров.
Так как при наличии в радиолинии более пяти каналов, по которым одновременно передаются команды, практически невозможно избавиться от взаимного влияния каналов, то в связи с этим не строятся системы, предназначенные для передачи более чем пяти команд одновременно. К тому же в этом случае резко уменьшается дальность действия. Это объясняется тем, что когда в многоканальной радиолинии (при числе каналов п) все частоты этих каналов модулируют несущую одновременно, то модуляция каждого канала составит 100%/n.
Существуют, однако, способы практически одновременной передачи двух команд без снижения глубины модуляции по каждому каналу. О них будет рассказано при описании аппаратуры.
Таким образом, аппаратура для радиоуправляемых моделей состоит из передающей и приемной частей. Передающая аппаратура содержит УКВ передатчик, шифратор и пульт для подачи команд. Приемная аппаратура содержит приемник и дешифратор команд.
На спортивной радиоуправляемой автомодели исполнительными механизмами являются один ходовой электродвигатель (реже два) и рулевая машинка. Вот почему управление такой моделью не требует чрезмерно усложненных систем аппаратуры радиоуправления. Например, пятиканальная аппаратура с последовательной подачей команд обеспечивает хорошее управление колесной автомоделью, исполняющей команды «вперед», «стоп», «назад», «налево», «направо». При некотором усложнении бортовой автоматики возможно применение аппаратуры, имеющей четыре и даже три канала. Правда, иногда требуется более сложная многоканальная аппаратура, обеспечивающая одновременную передачу двух команд, или аппаратура с одним каналом пропорционального управления рулевым механизмом и несколькими каналами для разовых команд. Для управления автомоделями с двигателями внутреннего сгорания применяются системы с двумя каналами пропорционального управления.
Чем же руководствоваться при выборе фабричной аппаратуры или при самостоятельном ее изготовлении? Какими должны быть режим работы и мощность излучения передатчика? Каким техническим требованиям должны удовлетворять передающая и приемная части аппаратуры? Такие вопросы прежде -всего встают перед тем, кто берется за изготовление радиоуправляемой автомодели.
Для радиоуправления моделями в диапазоне УКВ выделены частоты: 27,12 Мгц, 28÷28,2 Мгц, 144÷146 Мгц. Наиболее «обжиты» частоты 27,12 Мгц и 28÷28,2 Мгц. Конструирование аппаратуры на более высоких частотах связано со многими трудностями и поэтому их осваивают менее охотно.
Передатчики разрешается иметь, по мощности излучения не превышающие 1 вт и только с амплитудной модуляцией несущей частоты. Разрешение на пользование передатчиком должно быть оформлено через Инспекцию электросвязи. Практика показала, что для радиоуправления автомоделями вполне достаточна мощность излучения передатчика в пределах 0,15÷0,5 вт. В паузах между командами передатчик должен излучать колебания несущей частоты, которые могут быть модулированы, но только нерабочим тоном. Правда, работа передатчика в таком режиме сокращает срок действия комплекта батарей питания, но зато повышает помехоустойчивость системы радиоуправления.
Промышленная и некоторые заслуживающие внимания образцы самодельной аппаратуры содержат многокаскадные передатчики, у которых задающий генератор имеет кварцевую стабилизацию частоты.
Очень важно, чтобы обеспечивалось удобство подачи команд и эксплуатации передатчика. Поэтому он должен иметь индикатор излучения и прибор для контроля напряжения батарей. Следует позаботиться и о надежной системе подключения батарей, чтобы их замену можно было производить быстро, прямо у линии старта.
Бортовая часть системы радиоуправления моделями содержит приемник сигналов и дешифратор команд.
Несмотря на то, что с появлением транзисторов и миниатюрных радиодеталей появилась возможность создания малогабаритных и экономичных супергетеродинных радиоприемников, моделисты предпочитают по-прежнему сверхрегенеративные приемники, так как они обладают рядом положительных качеств:
- высокой чувствительностью, необходимой для уверенного приема радиокоманд на небольшую антенну;
- помехоустойчивостью, необходимой при размещении приемника в непосредственной близости от источников искровых радиопомех;
- простотой схемы;
- экономичным потреблением электроэнергии;
- несложной регулировкой, доступной радиолюбителям;
- нормальной работой при изменении входного сигнала в широких пределах.
Имеющиеся же у сверхрегенеративного приемника недостатки, такие как широкая полоса, большой уровень шумов, а также нелинейные искажения, в условиях ходовых испытаний практической роли не играют. К тому же широкая полоса приемника понижает требования к стабильности частоты передатчика, что позволяет обойтись и без кварцевой стабилизации частоты задающего генератора передатчика.
Применяя высокочастотные транзисторы, можно построить надежно работающие сверхрегенеративные приемники па частоты от 20 до 250 Мгц.
Ниже приводится описание принципа работы сверхрегенеративного приемника, выполненного на электронных лампах, однако все рассуждения справедливы и для схемы на транзисторах. В эквиваленте катоду лампы соответствует эмиттер транзистора, сетке — база, а аноду — коллектор транзистора.
Сверхрегенеративные приемники относятся к категории приемников с положительной обратной связью. В этой аппаратуре часть энергии усиленных лампой колебаний из анодной цепи подводится ко входному контуру таким образом, чтобы ЭДС обратной связи, наведенная во входном контуре, совпадала бы по фазе с ЭДС принимаемого сигнала. Тогда ЭДС в контуре увеличится па величину ЭДС обратной связи, что физически равноценно уменьшению потерь в контуре или введению в контур отрицательного активного сопротивления.
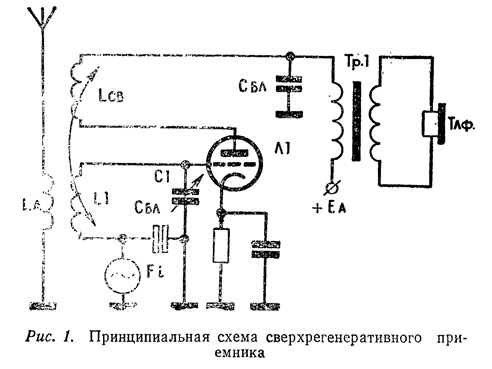
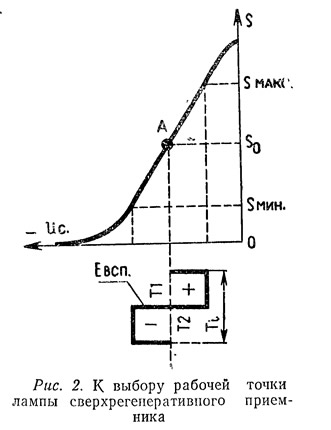
В схеме приемника, изображенной на рис. 1, во входную цепь лампы, кроме ЭДС принимаемого сигнала, вводится еще ЭДС вспомогательной частоты порядка 150 кгц, которая значительно превышает максимальную частоту модуляции принимаемого сигнала. На рис. 2 изображена кривая зависимости крутизны характеристики электронной лампы от напряжения на сетке.
Рабочая точка обозначена буквой Л. Величину обратной связи установим равной критической, т. е. такой, при которой даже незначительное ее повышение или увеличение крутизны характеристики лампы приведет к самовозбуждению схемы. Рассмотрим теперь происходящие в схеме процессы при отсутствии сигнала в антенне. Для простоты рассуждений примем форму вспомогательного напряжения прямоугольной. Крутизна характеристики S будет изменяться с частотой приложенного напряжения от значения Sмин до Sмакс. При положительном полупериоде вспомогательного напряжения Т1, когда S=Sмакс, схема будет самовозбуждаться на частоте, равной собственной частоте контура, и колебательное напряжение на контуре начнет возрастать. При отрицательном полупериоде вспомогательного напряжения T2, когда S=Sмин, самовозбуждение прекратится и колебательное напряжение на контуре станет убывать. Таким образом, напряжение будет представлять собой серию импульсов высокочастотного напряжения с частотой следования, равной частоте вспомогательного напряжения и частотой заполнения импульса, равной собственной частоте контура. Так как в каждом контуре всегда имеется так называемое шумовое напряжение Uш, то напряжение на контуре при наступлении самовозбуждения начинает возрастать не с нуля, а с величины напряжения Uш. В этом случае амплитуда напряжения на контуре будет определяться формулой:
где Um0 — начальная амплитуда напряжения на контуре, равная напряжению шумов;
rэ1 — абсолютная величина сопротивления контура во время самовозбуждения;
L — индуктивность контура;
t — время.
Во время отсутствия сигнала в антенне в телефонах сверхрегенеративного приемника будет прослушиваться характерный шипящий звук. Это объясняется тем, что напряжение Uш беспорядочно меняется во времени. В зависимости от частоты вспомогательного напряжения Fi и величины rэ1/2L могут быть два режима работы.
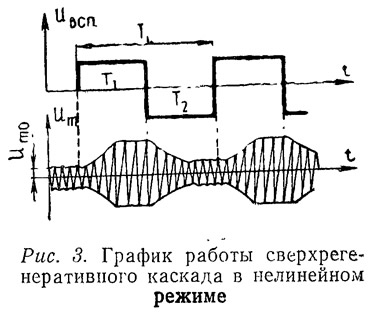
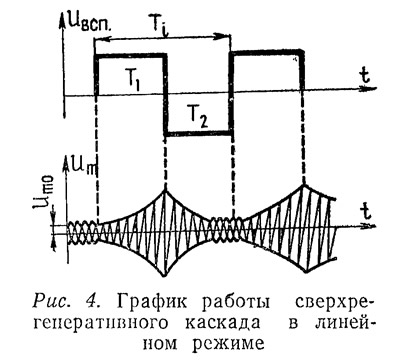
В то время, когда частота Fi мала (т. е. период Ti) велик и величина rэ1/2L велика), напряжение на контуре достигает значения, которое обусловлено нелинейностью характеристики лампы и сеточным током, раньше чем наступит конец положительного полупериода вспомогательного напряжения Т1, и которое затем останется неизменным до конца положительного полупериода вспомогательного напряжения T1. С момента наступления отрицательного полупериода Т2 самовозбуждение прекратится и амплитуда напряжения па контуре начнет убывать (рис. 3). Такой режим работы сверхрегенератора называют нелинейным. Если же частота Fi велика (т. е. период Ti мал) и величина rэ1/2L мала, то напряжение на контуре во время положительного полупериода вспомогательного напряжения не успеет достичь установившегося значения, а при наступлении отрицательного полупериода вспомогательного напряжения сразу начнет убывать (рис. 4). Такой режим работы сверхрегенератора называют линейным.
Рассмотрим теперь случай, когда на контур сверхрегенератора, работающего в линейном режиме, поступает из антенны ЭДС принимаемого сигнала Ес, которая превышает по своей величине уровень шумов Uш. Тогда напряжение на контуре в соответствии с формулой (1) к концу полупериода Т1 достигнет величины:
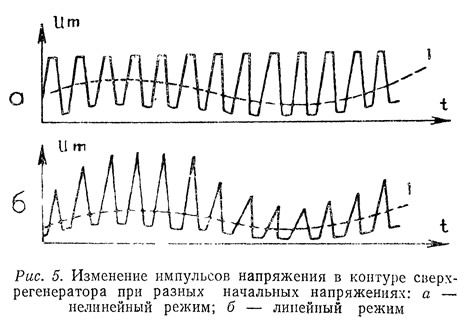
В этом случае величина начального напряжения U будет пропорциональна амплитуде сигнала Ес. Если принимаемый сигнал будет модулирован, то Ес начнет изменяться по закону модуляции. Шумы при этом будут подавлены, а в телефонах мы услышим частоту модуляции принимаемого сигнала. При подаче напряжения сигнала Ес из антенны па контур сверхрегенератора, работающего в нелинейном режиме, процесс нарастания напряжения на контуре также начинается с начальной амплитуды Ес, но рост амплитуды заканчивается раньше времени i=Т1. Если принимаемый сигнал модулирован, то начальная амплитуда Um0 изменяется по закону модуляции, а это, в свою очередь, ведет к изменению площади генерируемых импульсов, как это показано па рис. 5,а. Постоянная составляющая этих импульсов (линия 1), выделяемая после детектирования, будет также меняться во времени по закону модуляции. Нелинейный режим позволяет получить более стабильную работу, чем линейный, но нелинейные искажения при этом будут больше. Так как при нелинейном режиме амплитуда импульсов ограничена, ограничится и амплитуда импульсных помех, т. е. приемник будет помехоустойчивым. Очевидно, что для радиоуправления нелинейный режим наиболее пригоден.
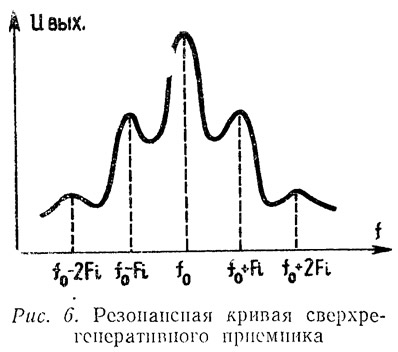
Резонансная характеристика сверхрегенератора имеет вид, изображенный на рис. 6. Усиление сверхрегенеративного каскада может достигнуть 1 000 000 раз и более.
Наиболее часто применяются приемники такого типа, у которых снерхрегенеративное усиление, детектирование и генерация вспомогательной частоты осуществляются в одном каскаде. Встречаются снерхрегенеративные приемники, у которых имеется отдельный генератор вспомогательной частоты.
На рис. 29 приведена схема получившего широкое распространение среди моделистов сверхрегенератора для работы в диапазоне 28÷28,2 Мгц. Сверхрегенеративный каскад выполнен на одном транзисторе Т1 и совмещает функции сверхрегенеративного усилителя, детектора и генератора гасящей частоты.
Частота повторения срыва колебаний F будет определяться произведением R3C3. При уменьшении R3C3 частота Fi будет увеличиваться. Подбирая R3C3, можно добиться того, чтобы приемник работал в требуемом нелинейном режиме.
Сказанное здесь ни в коем случае не исключает целесообразность применения приемников супергетеродинного типа. Если имеется возможность, надо собирать супергетеродинный приемник, поскольку он имеет ряд преимуществ. Однако надо иметь в виду, что для целей телеуправления супергетеродинному приемнику нужен гетеродин с кварцевой стабилизацией частоты.
Для выделения (дешифрации) команд в приемном устройстве в основном применяются избирательные по частоте электронные реле с низкочастотными резонансными контурами. Системы с резонансными реле из-за ненадежности в работе в последнее время применяются редко.
Литература
- Ф. И. Барсуков. «Радиотелемеханика». М., Госэнергоиздат, 1962;
- Ю. Отряшенков. «Как сделать модель радиоуправляемой». М., Изд-во ДОСААФ, 1968.
- В. Палшков. «Радиоприемные устройства». М., «Связь», 1965, стр. 149-163.